

A Control Algorithm for Trajectory Correction of Mobile Robot
A technology of mobile robots and control algorithms, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of high price and achieve the effect of improving measurement accuracy, high initiative and intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0040] The present invention will be described in detail below with reference to the accompanying drawings and examples.
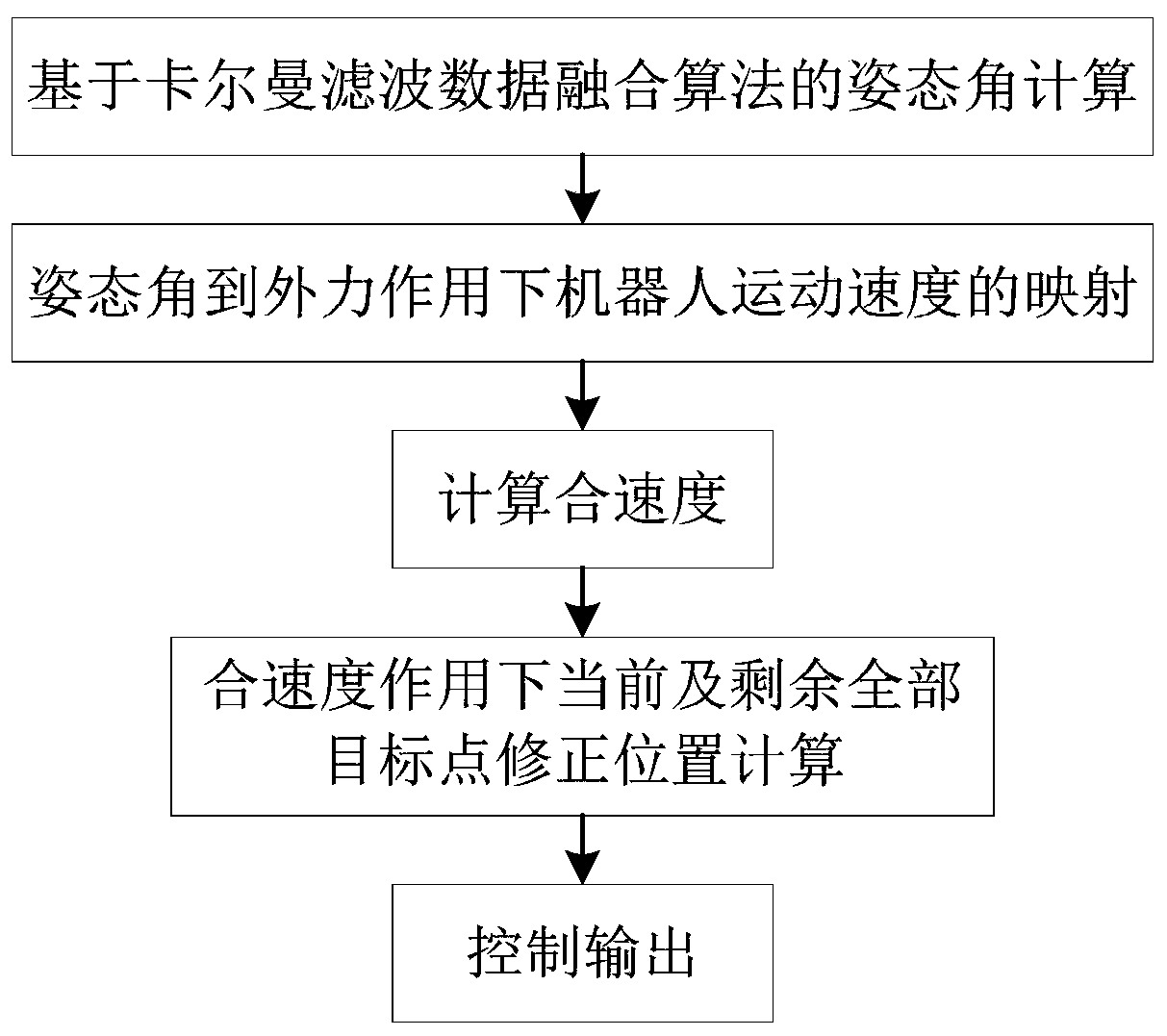
[0041] Such as figure 1 As shown, a mobile robot trajectory correction control algorithm includes the following steps:
[0042] (101) Utilize the IMU module located on the robot to calculate the attitude angle of the robot;
[0043] (102) Convert the change of attitude angle into motion velocity vector;
[0044] (103) Calculate combined speed;
[0045] (104) Calculate the corrected positions of the current and remaining all target points under the combined speed;
[0046] (105) Output the corrected motion track.
[0047] In a specific embodiment of the present invention, the upper body and the lower body of the robot are connected by a disc equipped with springs, and the IMU is placed horizontally on the disc at the waist. When the human pushes, pulls or twists the upper body of the robot, the real-time output value of the IMU will change, and after K...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More