

An Interactive Multi-Model Filtering Method for Wheel Force Sensors
An interactive multi-model, wheel force technology, applied in the field of automobile measurement and control, can solve the problem of difficulty in modeling random wheel force signals, and achieve the effect of strong practicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments.
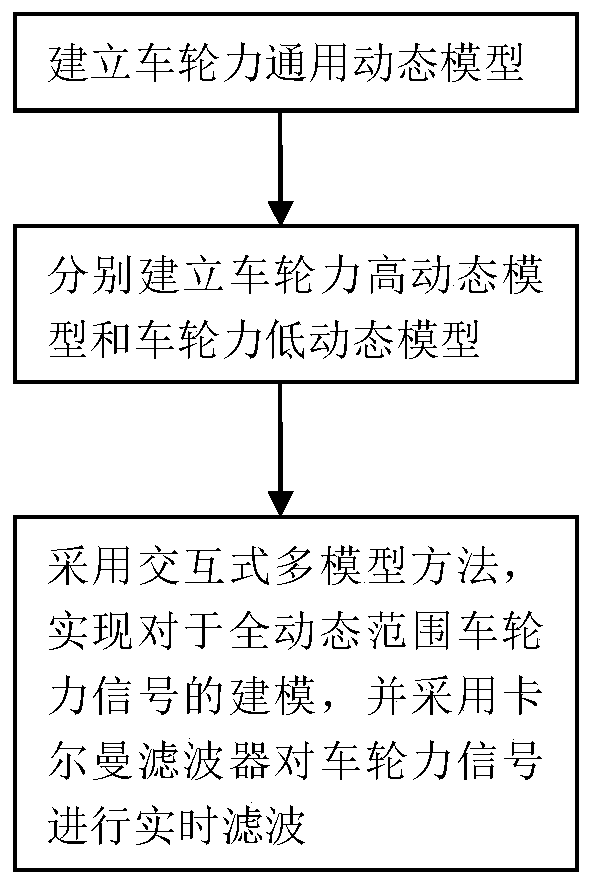
[0028] Such as figure 1 Shown: An interactive multi-model filtering method for wheel force sensors, including the following steps:
[0029] Step 1: According to the characteristics of strong randomness of the wheel force signal and the mathematical relationship between the direct output of the wheel force sensor and the real wheel force, a general dynamic model of wheel force based on the Singer model is established;
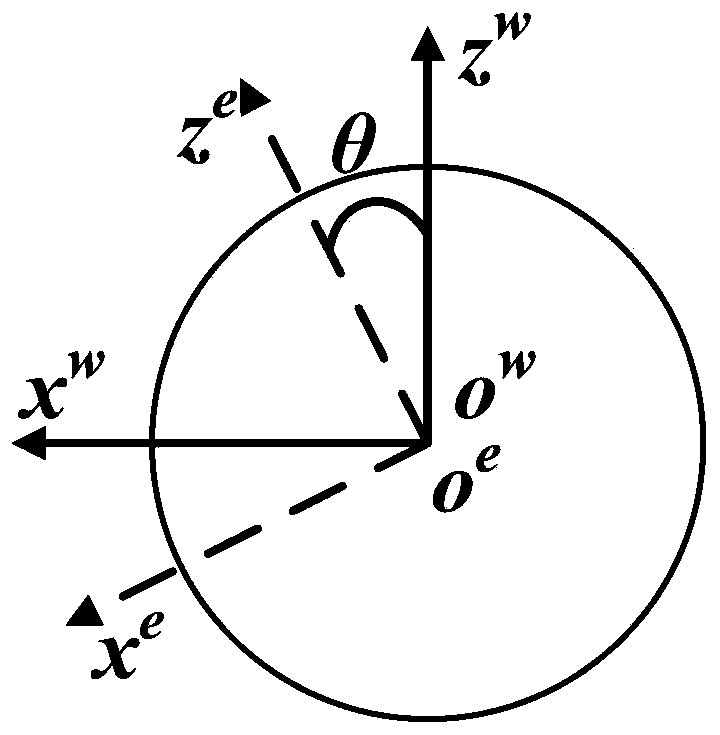
[0030] In order to clearly illustrate the relationship between the real wheel force and the output of the wheel force sensor, the real wheel force coordinate system and the wheel force sensor coordinate system are respectively established, as shown in image 3 shown. The real wheel force coordinate system is defined as follows: select the center of the wheel as the coordinate origin o w , axis o w z w Vertically upwards, axi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More