

Adaptive optimal ad-hoc network method based on multiple robots and Gaussian signal
A signal model and multi-robot technology, applied in the field of communication, can solve problems such as no robot scheduling strategy, and achieve the best communication quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with the description of the drawings and specific embodiments.
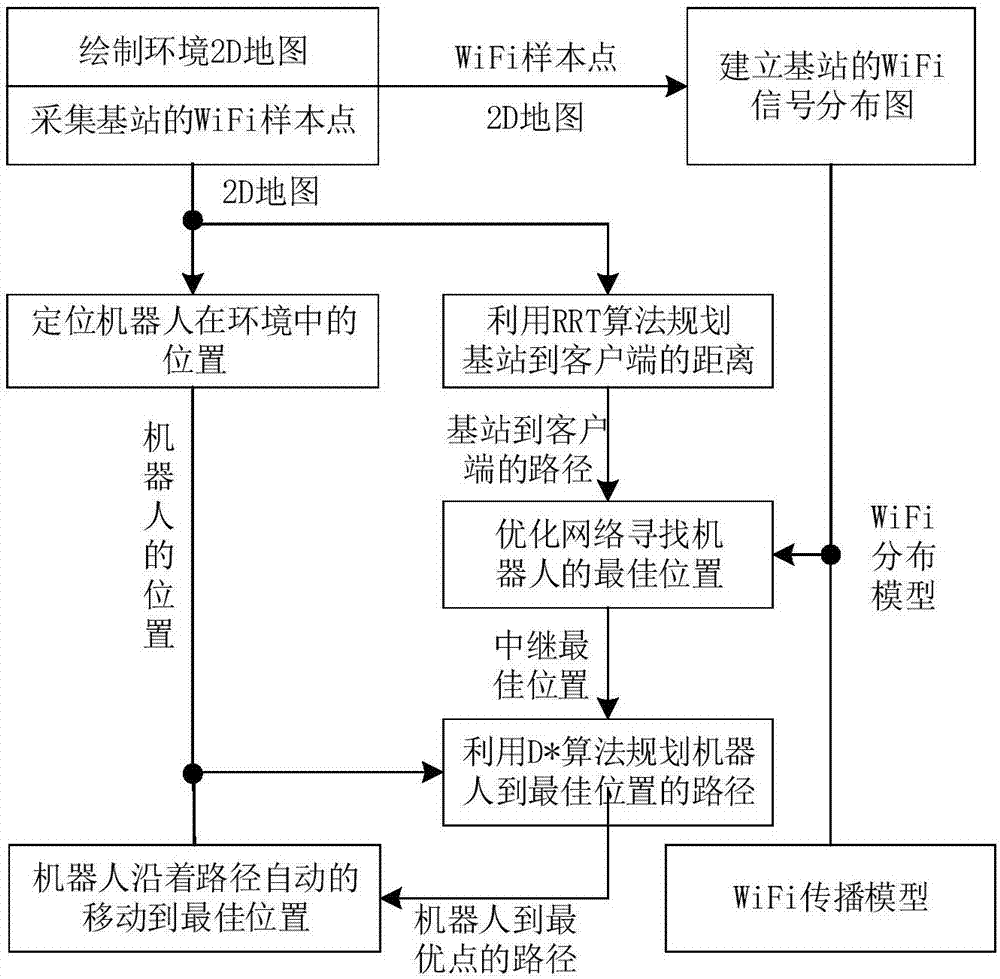
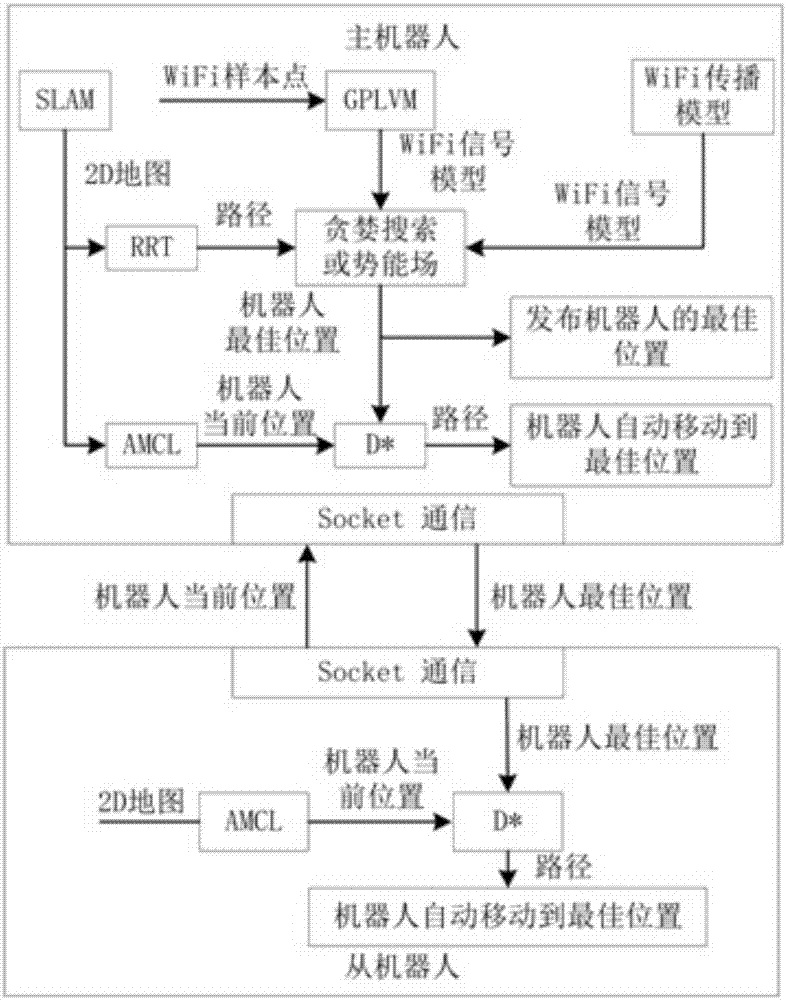
[0028] like Figure 1 to Figure 3 As shown, an adaptive optimal ad hoc network method based on multi-robot and Gaussian signal model, including the following steps:
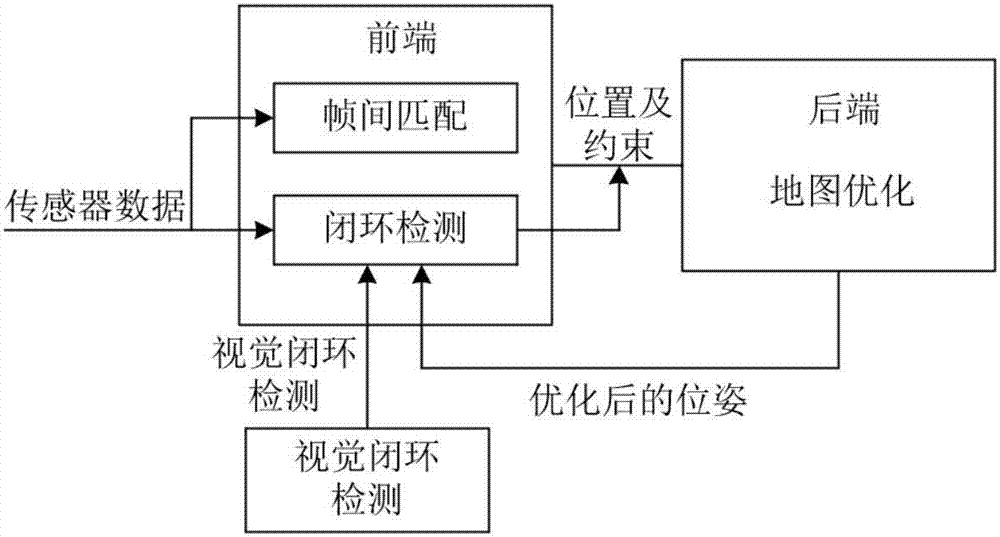
[0029] 1) Step 1: The master robot draws a two-dimensional map of the entire working environment. The present invention uses a laser and a camera to draw a 2D map of the environment, and the specific drawing process is as follows figure 2 shown. The entire drawing process is divided into front-end and back-end. The front end mainly consists of sequential registration and loop closure detection. These two parts are based on the observation information of the sensor to establish the constraint relationship between the robot nodes. The front-end processes the relationship of local data, and the back-end mainly processes the global data. Together, the two complete the cons...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More