Multi-robot smell source positioning method based on fruit fly optimization algorithm
A fruit fly optimization algorithm and multi-robot technology, applied in the directions of instruments, computing, computing models, etc., can solve problems such as discrete domain optimization problems that have not yet been directly applied
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
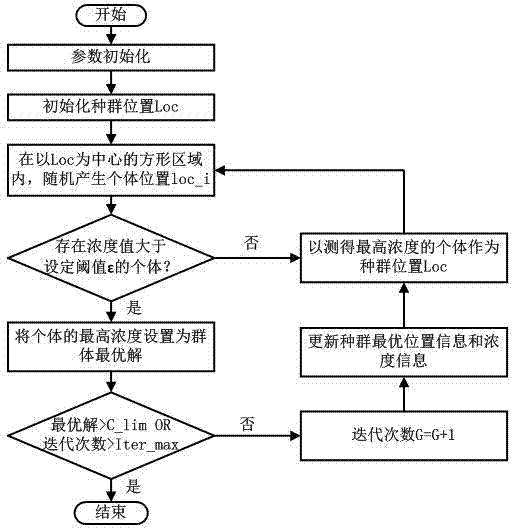
[0018] 1. Initialization.
[0019] 1.1 Set the initial parameters: randomly select a position in the search space Pos As the initial position of the robot group, set the size of the population size , initial concentration threshold α and the initial step value L 0 .
[0020] 1.2 Set the algorithm termination condition: the concentration threshold of the search space C lim and the maximum number of iterations G max .
[0021] 2. Plume discovery and plume tracking: The fruit fly population iteratively updates the location of the odor source according to the step value of the adaptive change.
[0022] 2.1 Calculate the adaptive step value step : The size of the adaptive step value is determined by the current group optimal concentration value Smellbest with a pre-set maximum concentration value in the environment C max The size relationship between is adaptively adjusted, which is determined by formula (1):
[0023] (1)
[0024] in L 0 For a given fixed step...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More