A Control Method for Spot Welding Grinding in Robot Welding Production Line
A technology of robot welding and control methods, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as missing beats, achieve the effects of improving beats, ensuring equipment utilization, and realizing unified management
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
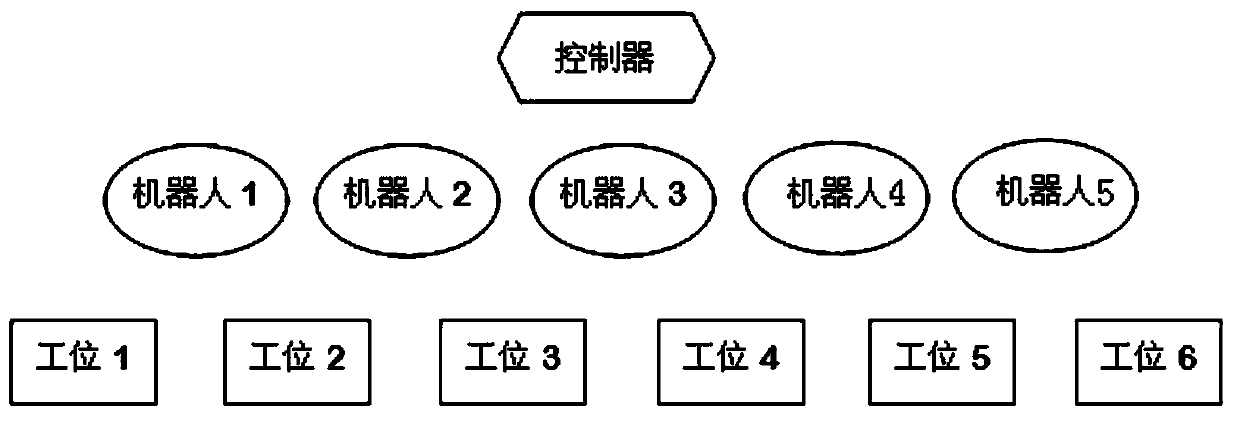
[0014] Such as figure 2 As shown, this embodiment is composed of five spot welding robots, six stations and a programmable logic controller. The spot welding robot 1 performs welding on station 1, and transports the workpiece to be welded from station 1 to station 1. 2. Spot welding robot 2 performs welding on station 2, and transports the welded parts from station 2 to station 3; spot welding robot 3 performs welding on station 3, and transfers the welded parts from station 3 Transfer to station 4; spot welding robot 4 performs welding on station 4, and transports the welded parts from station 4 to station 5; spot welding robot 5 performs welding on station 5, and transfers the welded parts Moving from station 5 to station 6; all equipment is controlled by a programmable logic controller.
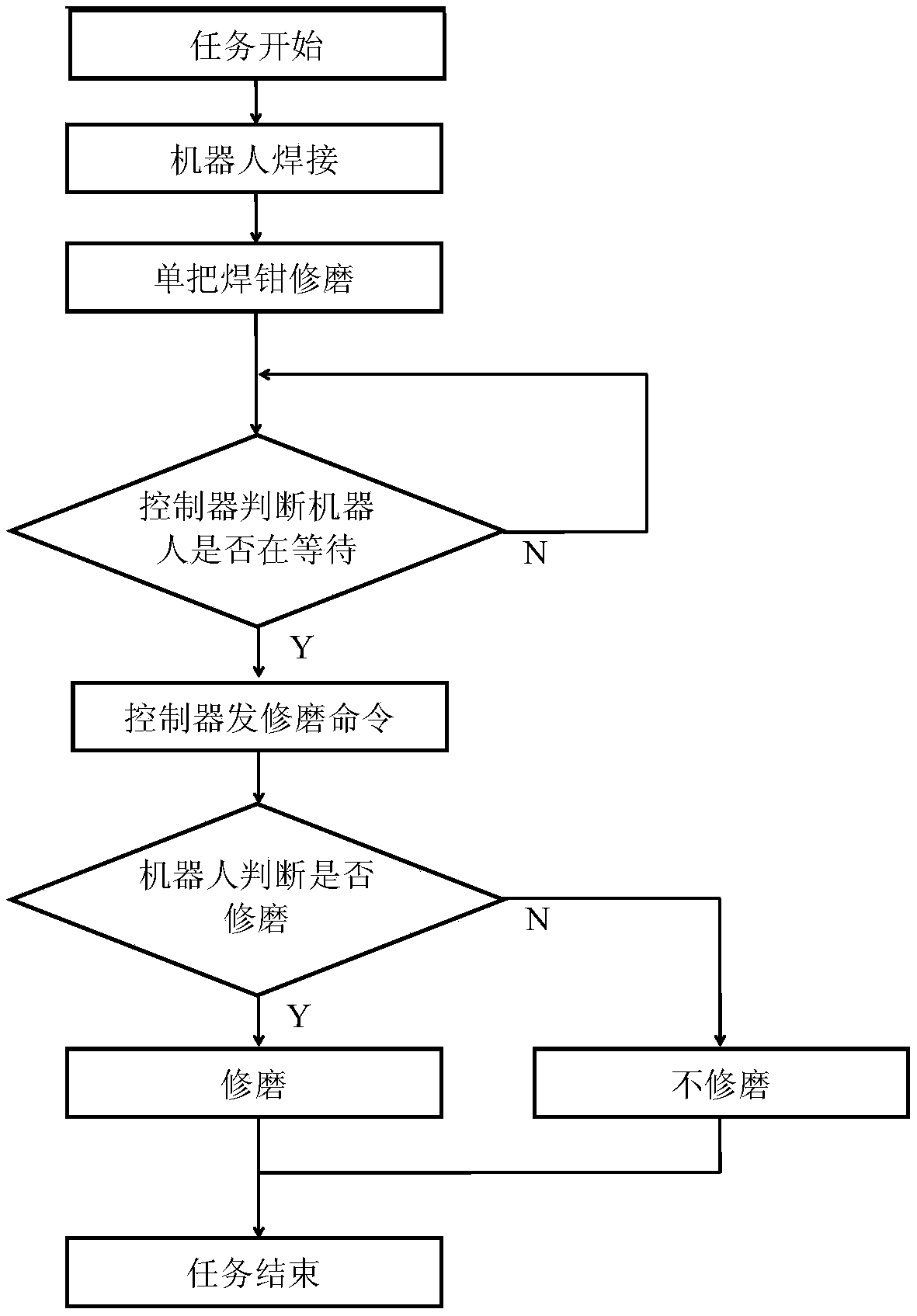
[0015] Such as figure 1 As shown, when working, each spot welding robot welds separately until one spot welding robot reaches the predetermined number of grinding pieces. Assuming that...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com