

Allocation method and device for multitasking of unmanned aerial vehicle
A distribution method and UAV technology, applied in the field of UAV, can solve the problem that the model cannot accurately simulate the actual motion state of the UAV, and can not give the track plan and so on.
Active Publication Date: 2017-08-29
HEFEI UNIV OF TECH
View PDF3 Cites 23 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
An object of the embodiments of the present invention is to solve the problem that the model cannot accurately simulate the actual motion state of the UAV due to the fact that the speed of the UAV is set to be constant when performing track planning in the prior art, and thus cannot give the best result. good track planning
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment Construction
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
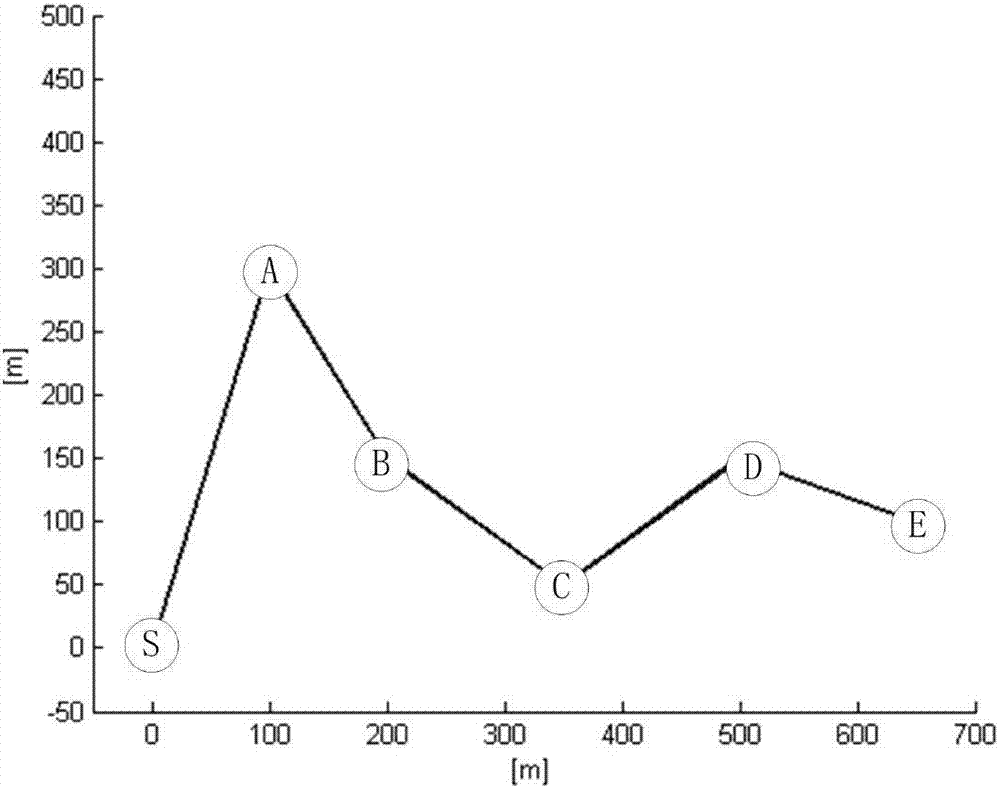
The embodiment of the invention discloses an allocation method and device for multitasking of an unmanned aerial vehicle. The method comprises the steps that location information of the unmanned aerial vehicle and multiple target points and motion parameters of the unmanned aerial vehicle and a wind field are obtained; according to the location information and a preset genetic algorithm, an initial population taking an European-style flight path as an individual is built; the flight state of the unmanned aerial vehicle and the running time of the track passage of the European-style flight path are determined according to the motion parameters of the initial population, the unmanned aerial vehicle and the wind field, and the running time corresponding to chromosomes in the initial population is obtained according to the running time of the track passage and an SUAV-VS-EVRP model; on the basis of the genetic algorithm, cross and mutation processing is conducted on the chromosomes in the initial population, and after the predetermined number of iterations is achieved, the European-style flight path with the shortest running time is selected as the optimal flight path of the unmanned aerial vehicle. Accordingly, the unmanned aerial vehicle track planning problem is combined with the actual flight environment of the unmanned aerial vehicle, and the optimal flight path scheme obtained through planning is superior to the unmanned aerial vehicle constant speed scheme.
Description
Method and device for distributing multi-tasks by unmanned aerial vehicles technical field Embodiments of the present invention relate to the technical field of unmanned aerial vehicles, and in particular to a method and device for distributing multi-tasks performed by unmanned aerial vehicles. Background technique At present, UAV (Unmanned Aerial Vehicle) has a wide range of applications in the military and civilian fields, and can complete various types of tasks such as target reconnaissance, target tracking, intelligence collection, post-earthquake rescue, and geological exploration. For example, when multiple UAVs cooperate to reconnaissance targets, it is necessary to allocate the target reconnaissance to each UAV most reasonably, and plan the optimal flight path for it. This problem is a joint optimization problem of task allocation and trajectory planning subject to multi-factor constraints, and it is also a non-deterministic problem. With the deepening of UAV res...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityApplications(China)
IPC IPC(8): G06F17/50G06N3/12
CPCG06F30/15G06F30/20G06N3/126
Inventor罗贺梁峥峥胡笑旋朱默宁王国强马华伟靳鹏夏维牛艳秋方向
OwnerHEFEI UNIV OF TECH