

A Robot Collision Detection Method Based on SCS Surrounding Structure
A collision detection and robot technology, applied in the field of robotics, can solve the problems of slow calculation speed and low detection accuracy, and achieve the effect of fast collision detection speed, high detection accuracy, and improved detection accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The following describes the present invention in further detail with reference to the accompanying drawings and embodiments. The flow of the robot collision detection method based on the SCS enclosing structure is as follows: Figure 4 Shown.
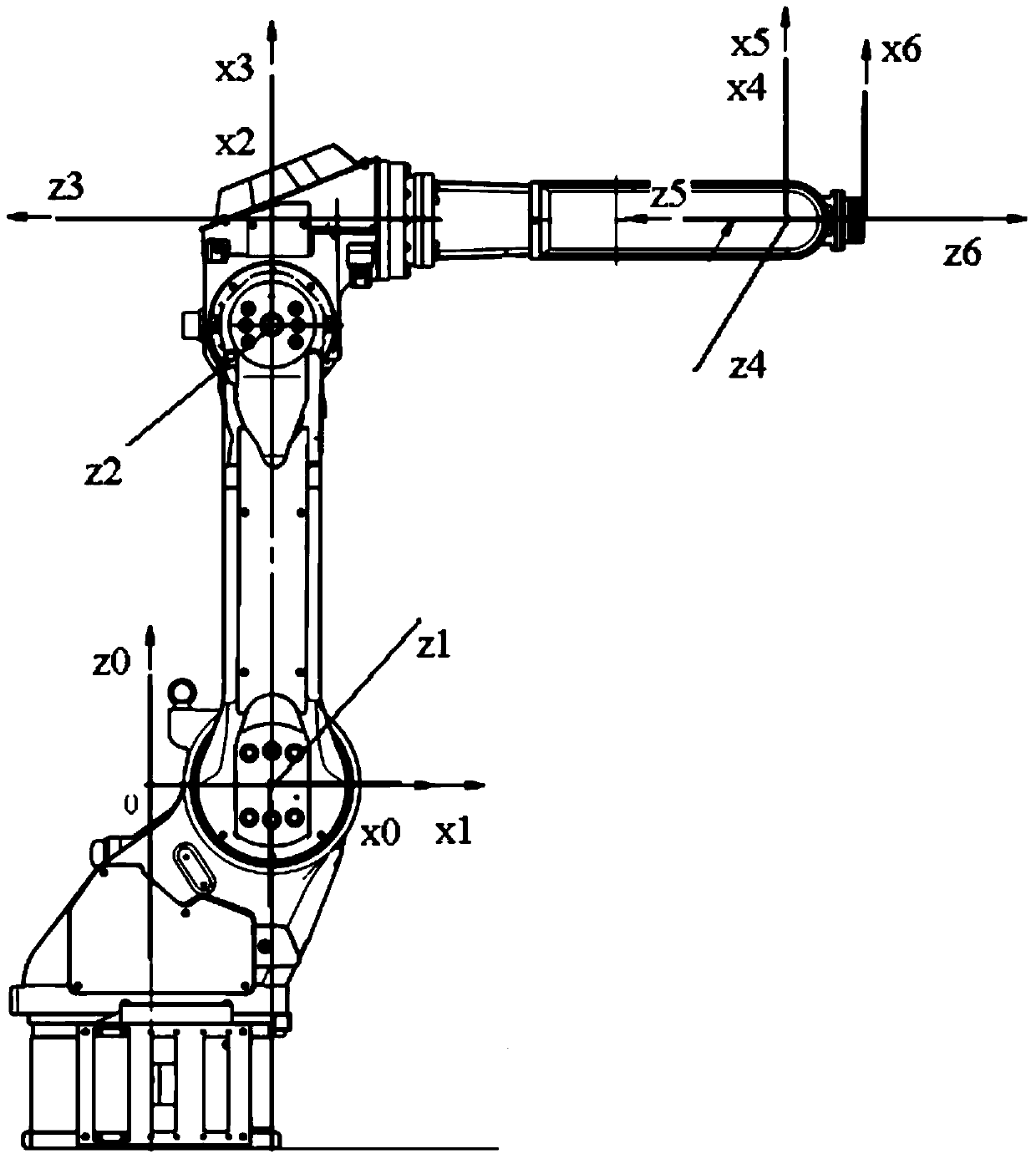
[0034] 1. In the initial stage, take MOTOMAN-MH6 robot as the object, such as figure 2 As shown, the robot rod coordinate system established by the DH method, in which the three coordinate axis directions of the coordinate system {0} are consistent with the corresponding X, Y, and Z coordinate axis directions in the world coordinate system, and the coordinate system {i-1} The change matrix to the coordinate system {i} is:
[0035]
[0036] among them, They are the posture matrix and position matrix of the coordinate system {i} relative to the coordinate system {i-1}; θ i Is the rotation angle of joint i; β i Is the torsion angle between joint i and i+1; α i Is the length of joint i+1; d i Is the offset of joint i.
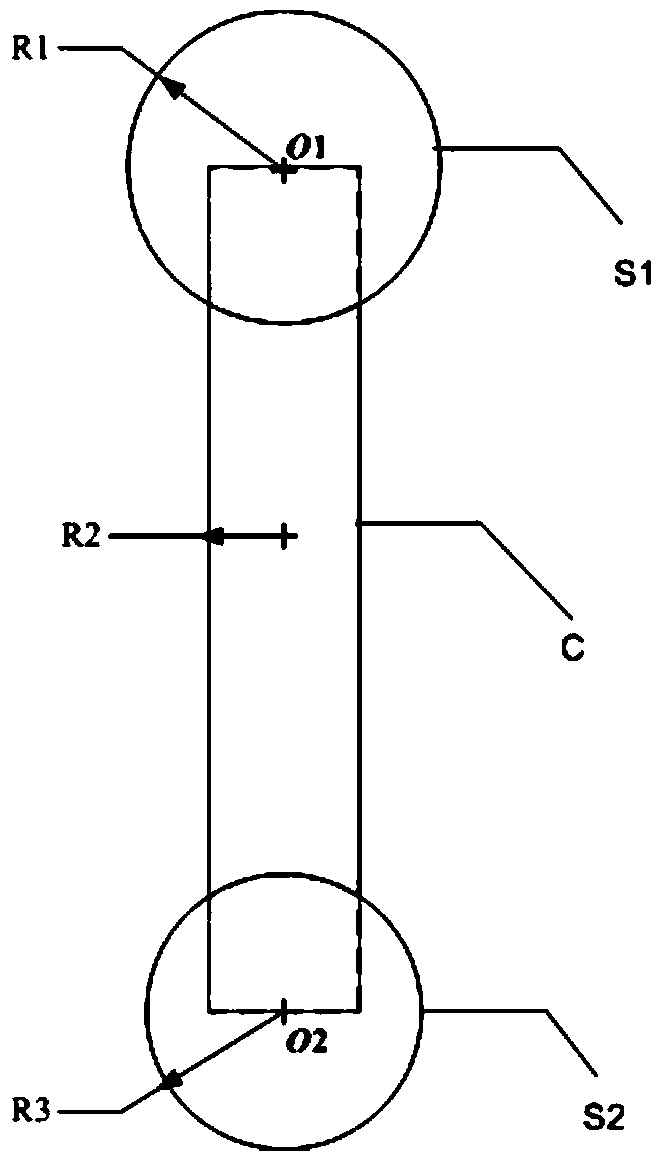
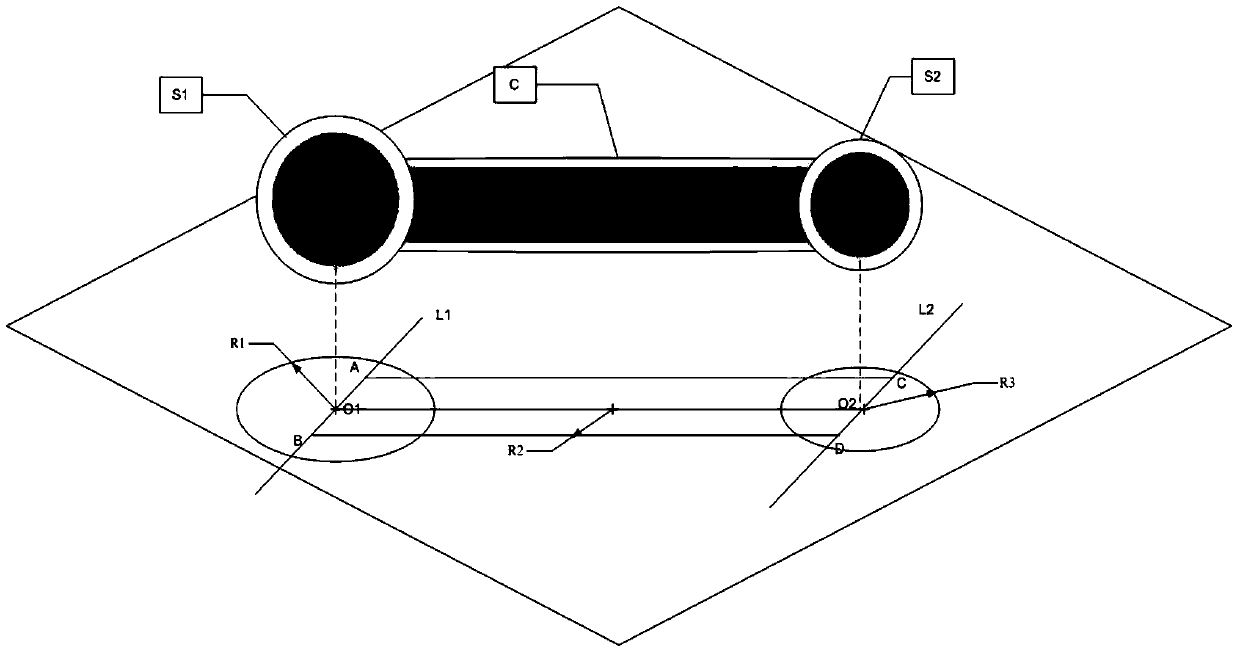
[0037] 2. Sphere-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More