

Virtual operation artificial system based on force feedback
A technology of virtual surgery and simulation system, which is applied in educational appliances, instruments, teaching models, etc., can solve the problems of expensive equipment, large differences in appearance and operation methods of surgical instruments, and difficulty in meeting the needs of virtual surgery systems. The effect of collision detection
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
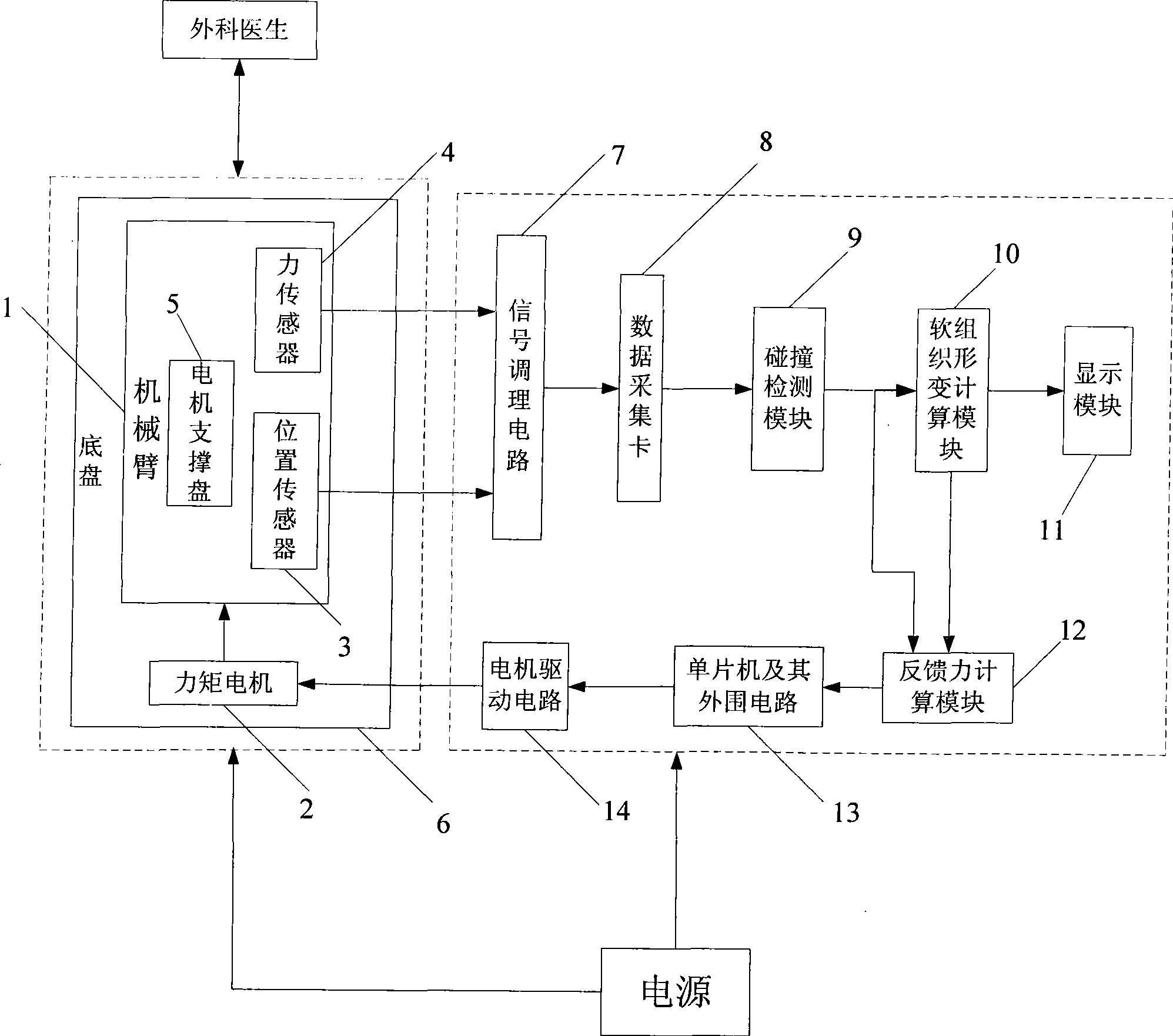
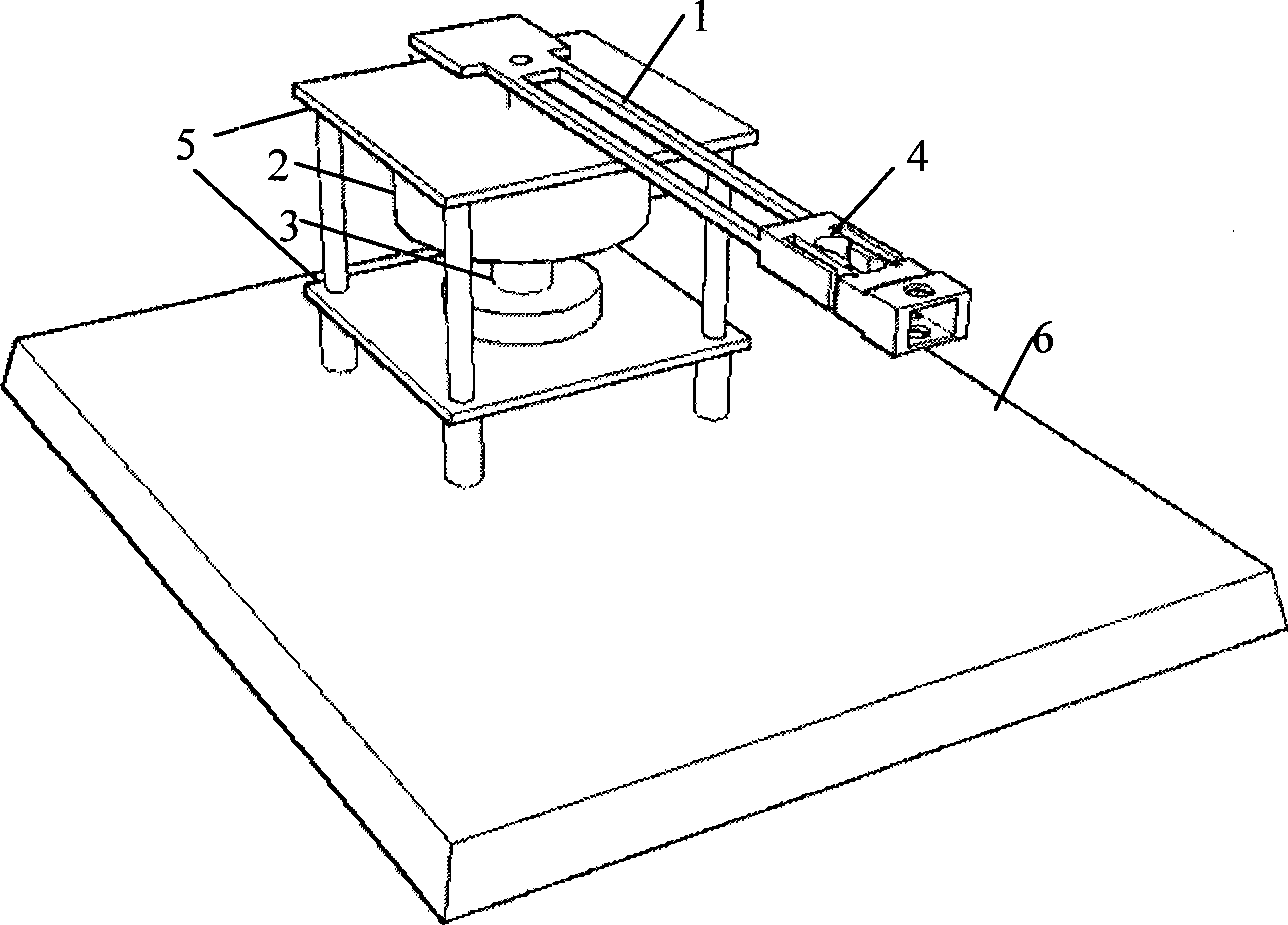
[0009] like figure 1 , figure 2 shown. The virtual surgery simulation system based on force feedback of the present invention includes a single-degree-of-freedom manipulator, a control circuit and a power supply, wherein the single-degree-of-freedom manipulator includes a manipulator 1, a torque motor 2, a position sensor 3, a force sensor 4, a motor support plate 5, and a chassis 6. The control circuit includes a signal conditioning circuit 7, a data acquisition card 8, a collision detection module 9, a soft tissue deformation calculation module 10, a display module 11, a feedback force calculation module 12, a single-chip microcomputer and its peripheral circuit 13, and a motor drive circuit 14; The motor 2 is fixed between the upper and lower support plates of the motor support plate 5, the position sensor 3 is installed on the lower part of the rotating shaft of the torque motor 2, the lower support plate of the motor support plate 5 is fixed to the chassis 6, and the up...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More