

Hydraulic drive stepping type metamorphic tree-climbing robot
A step-by-step, robotic technology, applied in the direction of motor vehicles, transportation and packaging, etc., can solve the problems of poor versatility of trees with different diameters, inability to perform tree climbing and work tasks well, and slow overall movement speed, so as to achieve easy access to relatively Strong force or torque, tree climbing work is safe and reliable, and realizes the effect of multi-directional steering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The technical solutions of the present invention will be clearly and completely described below in conjunction with the accompanying drawings and embodiments. Obviously, this is only a part of the embodiments of the present invention, not all of the embodiments. Based on the embodiments of the present invention, all other embodiments obtained by those skilled in the art without making creative efforts fall within the protection scope of the present invention.
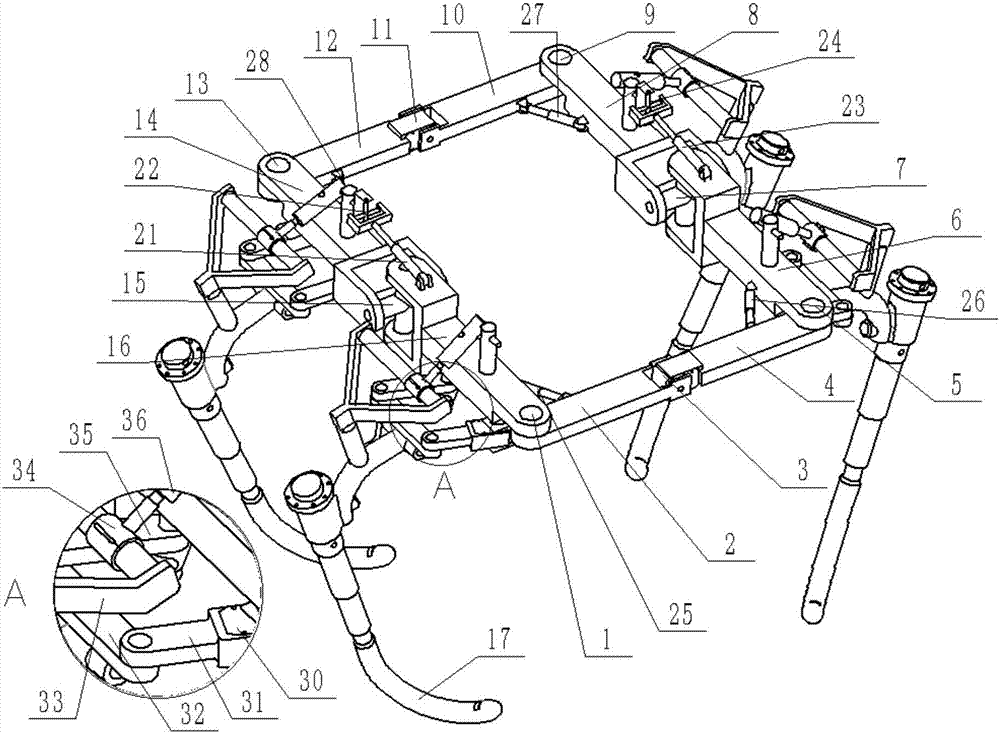
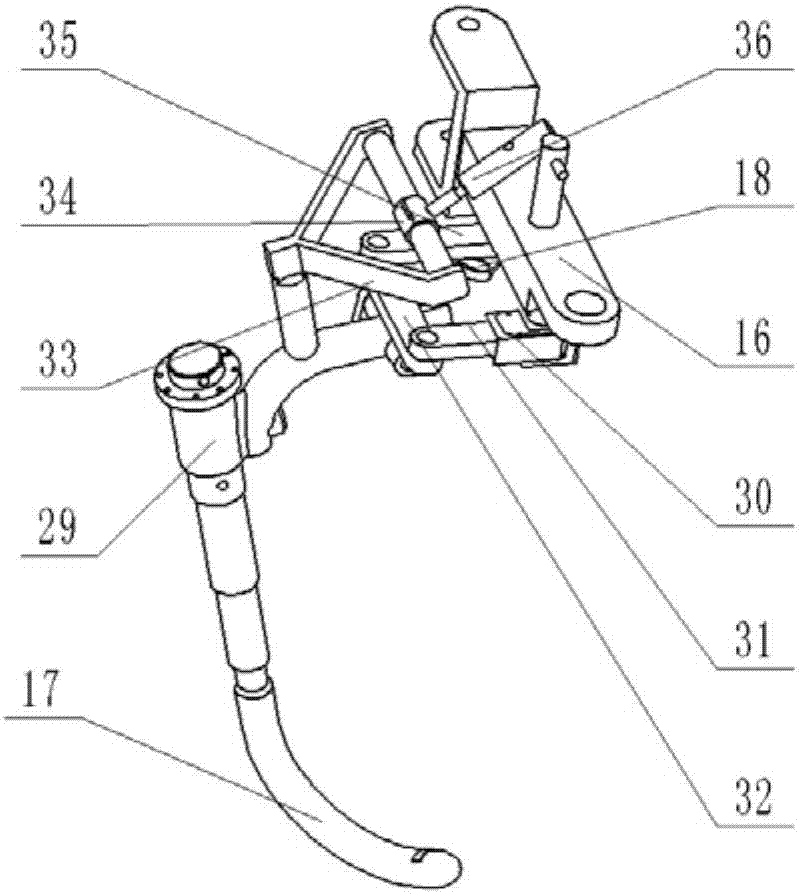
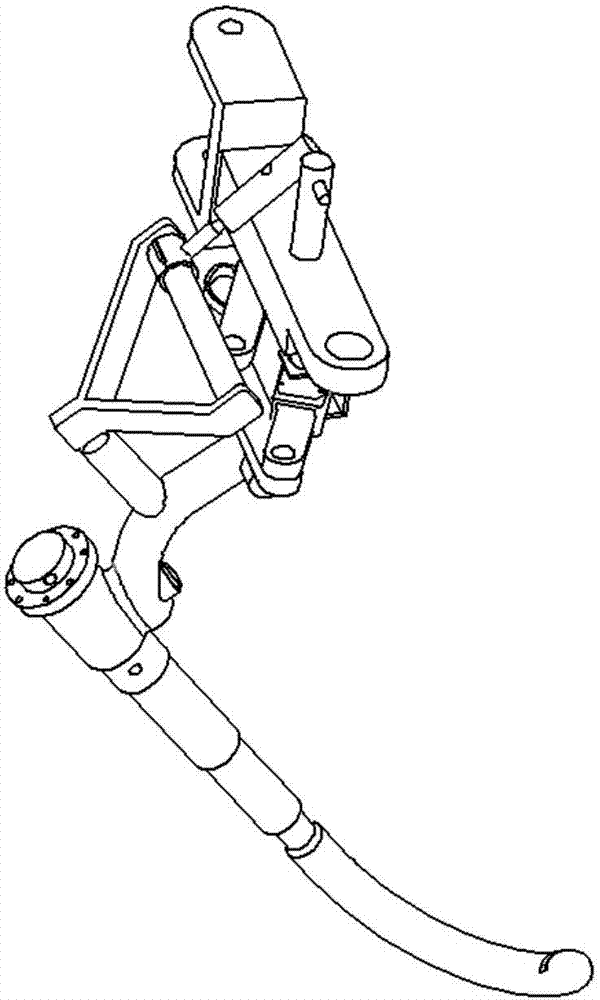
[0027] control figure 1 , figure 2 , Figure 8 and Figure 9 , the hydraulically driven step-by-step metamorphic tree climbing robot of the present invention includes a hydraulically driven mechanical leg system and a frame rod assembly, and the specific structure and connection relationship are:
[0028] The hydraulically driven mechanical leg system includes a first hydraulically driven mechanical leg system, a second hydraulically driven mechanical leg system, a third hydraulically driven mechanical leg sy...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More