

A method and system for autonomous positioning and map construction of unmanned vehicles
A self-driving car and autonomous positioning technology, which is applied to road network navigators and other directions, can solve the problems of inability to integrate multiple sensors, large-scale popularization, and low accuracy of positioning and map construction.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described below in conjunction with the accompanying drawings.
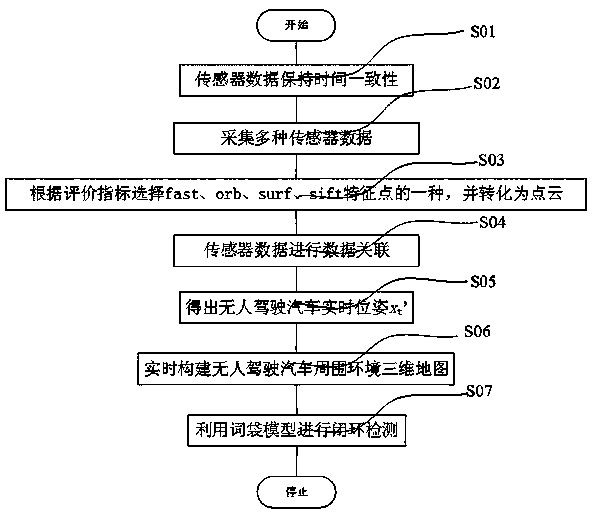
[0039] Such as figure 1 , a method for autonomous positioning and map construction of an unmanned vehicle, comprising the following steps:
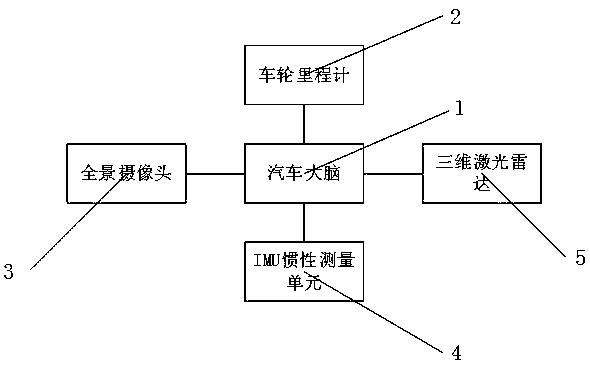
[0040] Step 1. Initialize the pose of the driverless car as x 0 , the trajectory of the driverless car is X 1:t ={x 1 ,x 2 ...x t}, correct the time of the driverless car wheel odometer, IMU inertial measurement unit, panoramic camera, and 3D lidar, so that the data of the driverless car wheel odometer, IMU inertial measurement unit, panoramic camera, and 3D lidar are time consistent sex;
[0041] Step 2. Collect the wheel odometer data U of the unmanned vehicle 1:t ={u 1 , u 2 ... u t}, the data I of the IMU inertial measurement unit 1:t ={i 1 ,i 2 ...i t}, panoramic camera data C 1:t ={c 1 ,c 2 ... c t}, 3D lidar data R 1:t ={r 1 ,r 2 ...r t}, the car brain calculates all environmental road signs around the d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More