

Improved Euclidean clustering-based scattered workpiece point cloud segmentation method
A point cloud and workpiece technology, applied in image analysis, computer parts, character and pattern recognition, etc., can solve problems such as under-segmentation and over-segmentation, and the effect of segmentation, so as to improve accuracy, improve efficiency, and improve segmentation speed effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] In order to illustrate the technical solutions and advantages of the present invention more clearly, the specific implementation manners of the present invention will be described below in conjunction with specific examples and with reference to the accompanying drawings.
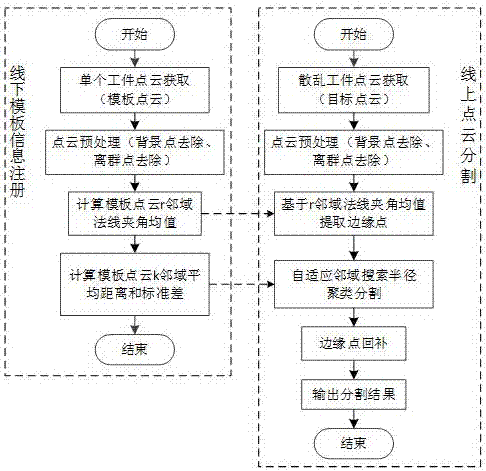
[0034] The purpose of the present invention is to divide the point cloud of scattered workpieces in the box into multiple point cloud subsets containing a single workpiece. The main process is divided into the following five parts: point cloud preprocessing, template point cloud offline information registration, target point cloud Edge point extraction, cluster segmentation based on adaptive neighborhood search radius, and edge point completion, such as figure 1 shown.
[0035] The specific implementation steps are:
[0036] (1) Point cloud preprocessing (take the target point cloud P as an example)
[0037] (1.1) The plane equation of the bottom of the box is calculated using the random sampling c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More