Control platform of executing mechanism
A technology for actuators and control platforms, applied in surgical robotics, medical science, surgery, etc., can solve the problem of low probability of successful surgery, achieve the effect of improving the success rate and avoiding arm soreness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further described below in conjunction with accompanying drawing.
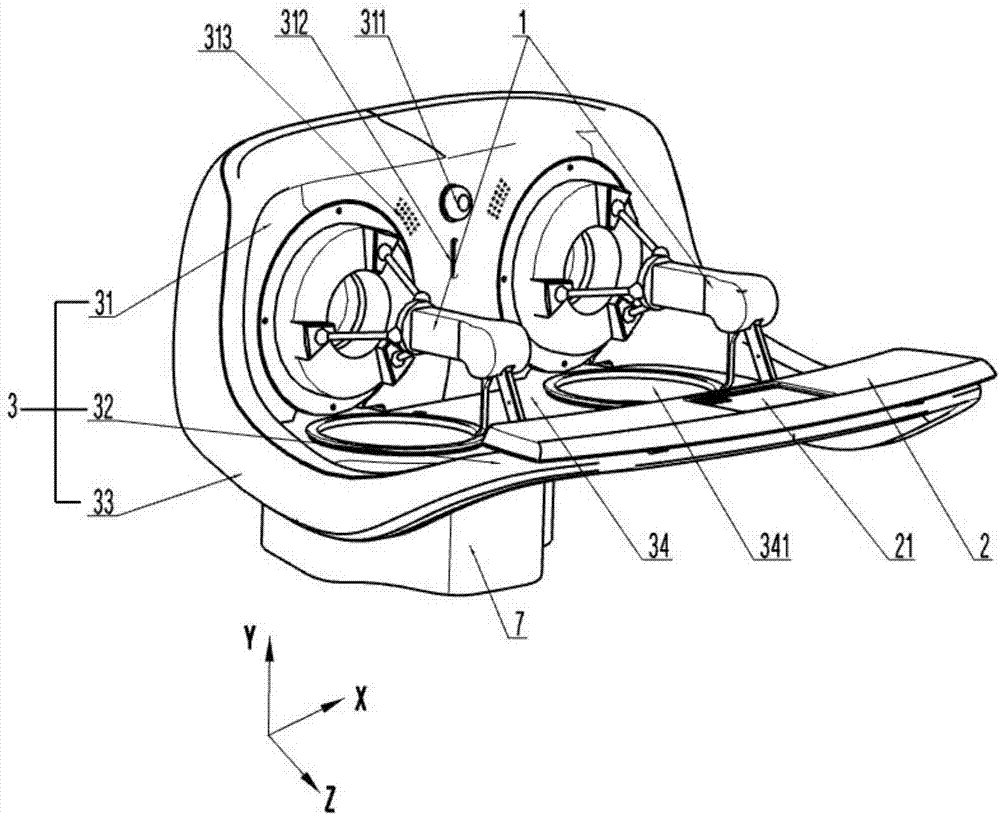
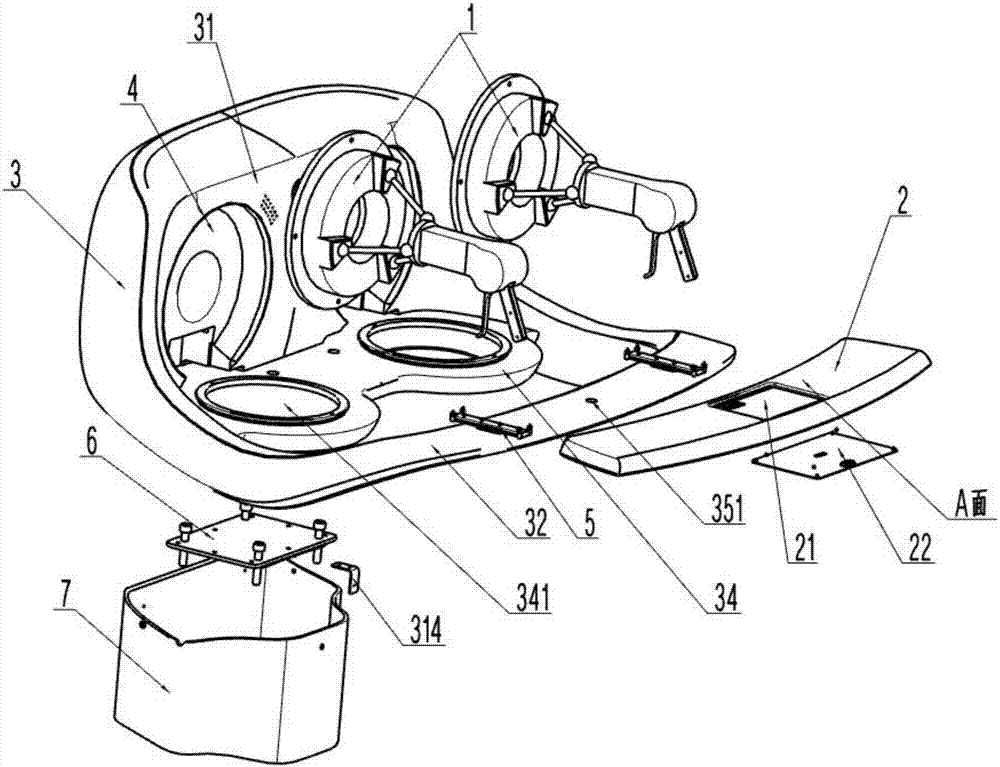
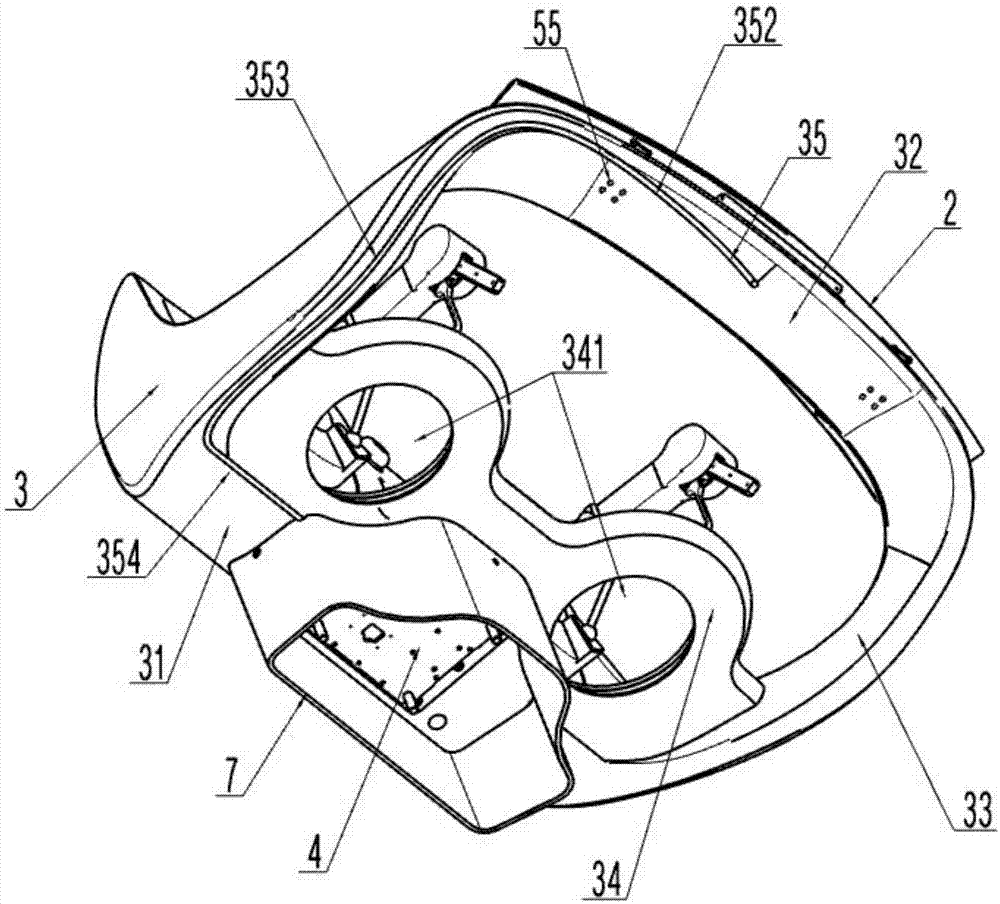
[0038] Such as figure 1 As shown, the present invention provides a manipulation platform for an actuator, which includes a controller 1 for manipulating the actuator, an elbow support platform 2 for supporting the doctor's arm, and a support base 3 .
[0039] At first the direction in the present invention is defined as follows: as figure 1 As shown, the control platform is erected in the right-hand Cartesian coordinate system, the vertical direction (the extension direction of the panel) is the Y-axis direction, the horizontal direction (the extension direction of the installation beam) is the X-axis direction, and the longitudinal direction (the extension direction of the slide rail) ) is the Z-axis direction. The direction in which the doctor stands is the direction of the Y axis, and when the doctor performs operations, his face faces the front end of the manipulation...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap