

A closed-chain walking leg mechanism
A closed-chain and chain-type technology, which is applied in the field of closed-chain walking leg mechanism, can solve the problems of complex control program, many controlled variables, and large load of joint drive motors.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
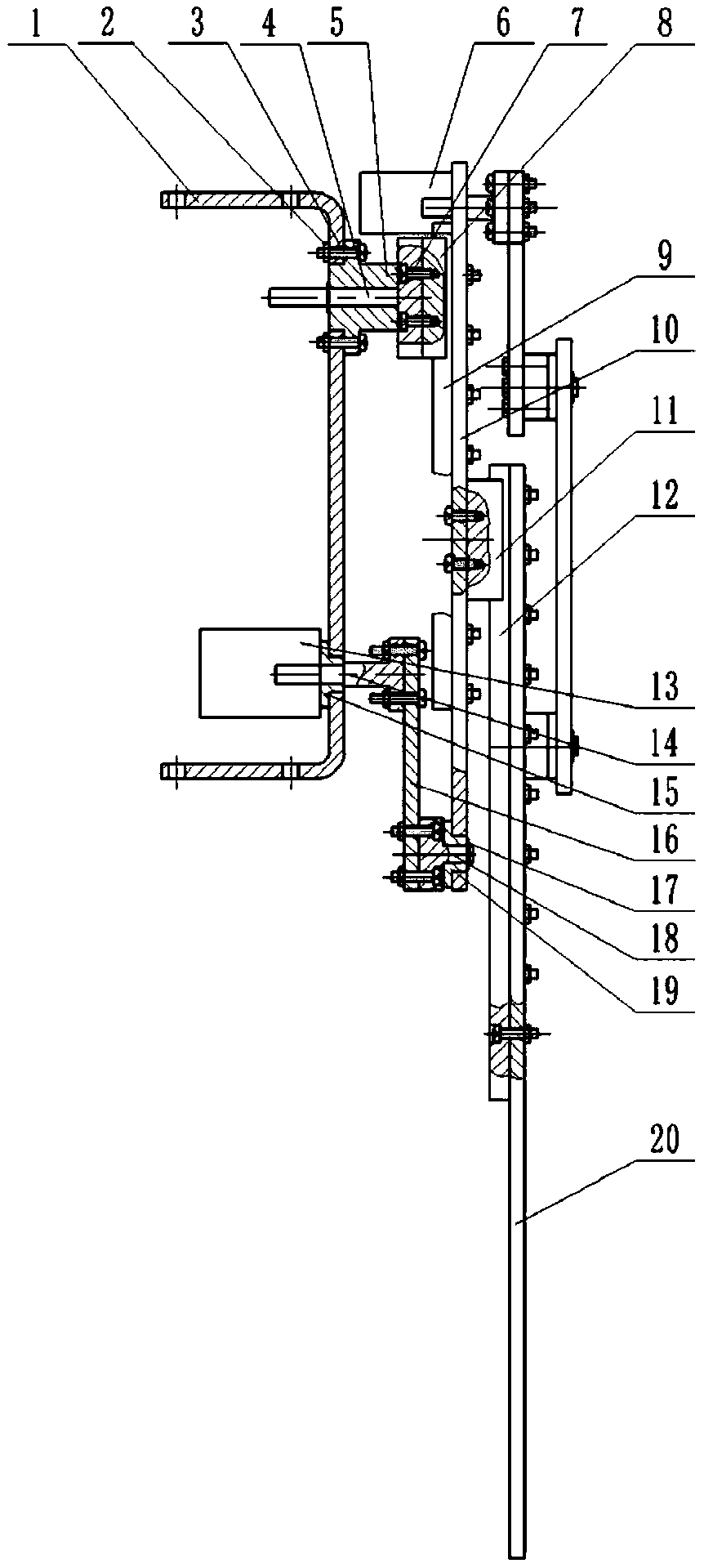
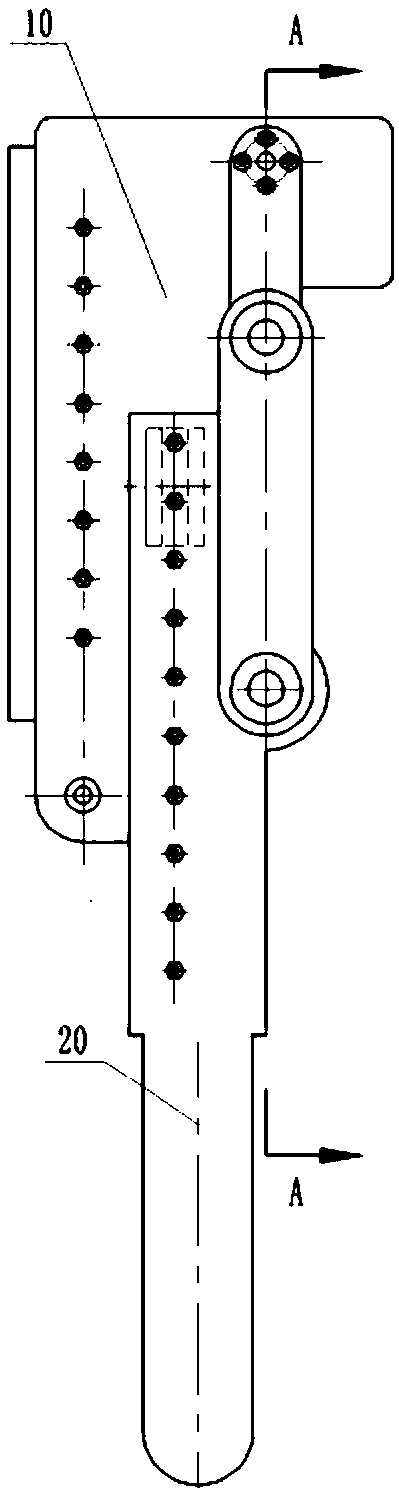
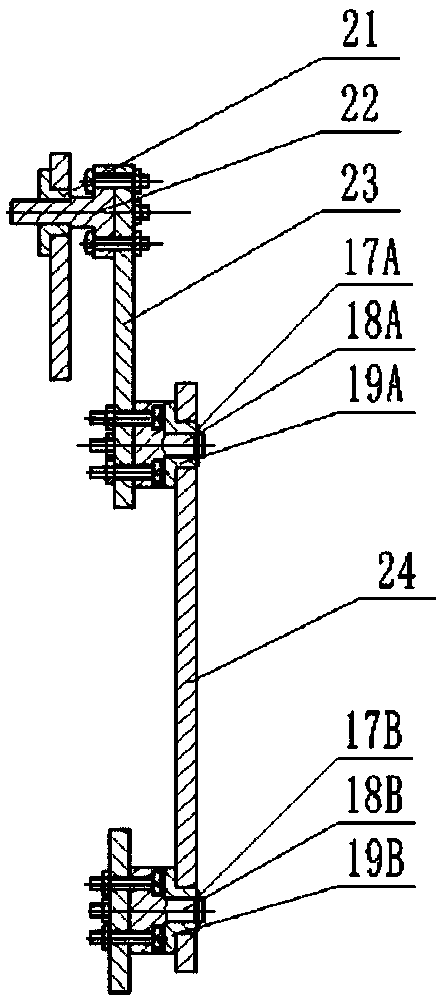
[0019] A closed-chain walking leg mechanism provided by the present invention includes a first closed-chain mechanism and a second closed-chain mechanism, the first closed-chain mechanism constitutes a thigh, the second closed-chain mechanism constitutes a calf, and the first closed-chain mechanism uses a crank The block mechanism, the first closed-chain mechanism includes a mounting bracket 1, a first connecting rod 10, a first crank 16, a first slider 8, a first motor 13, a fourth sliding bearing 5, a first rotating shaft 4, and a first guide rail 9 , the first crank shaft 14, the first axial stop ring 17, the first connecting rod shaft 18 and the first sliding bearing 19; the second closed-chain mechanism adopts a crank slider mechanism, and the second closed-chain mechanism includes a second slider 11 , the second motor 6, the second guide rail 12, the leg rod 20, the sixth sliding bearing 21, the second crankshaft 22, the second crank 23, the second connecting rod 24, the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More