

Humanoid robot based on pneumatic muscles
A technology of pneumatic muscles and robots, applied in the field of robots, to achieve the effects of compact structure, good flexibility, and high power/mass ratio
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The pneumatic muscle-based profiling robot of the present invention will be further described below in conjunction with specific embodiments.
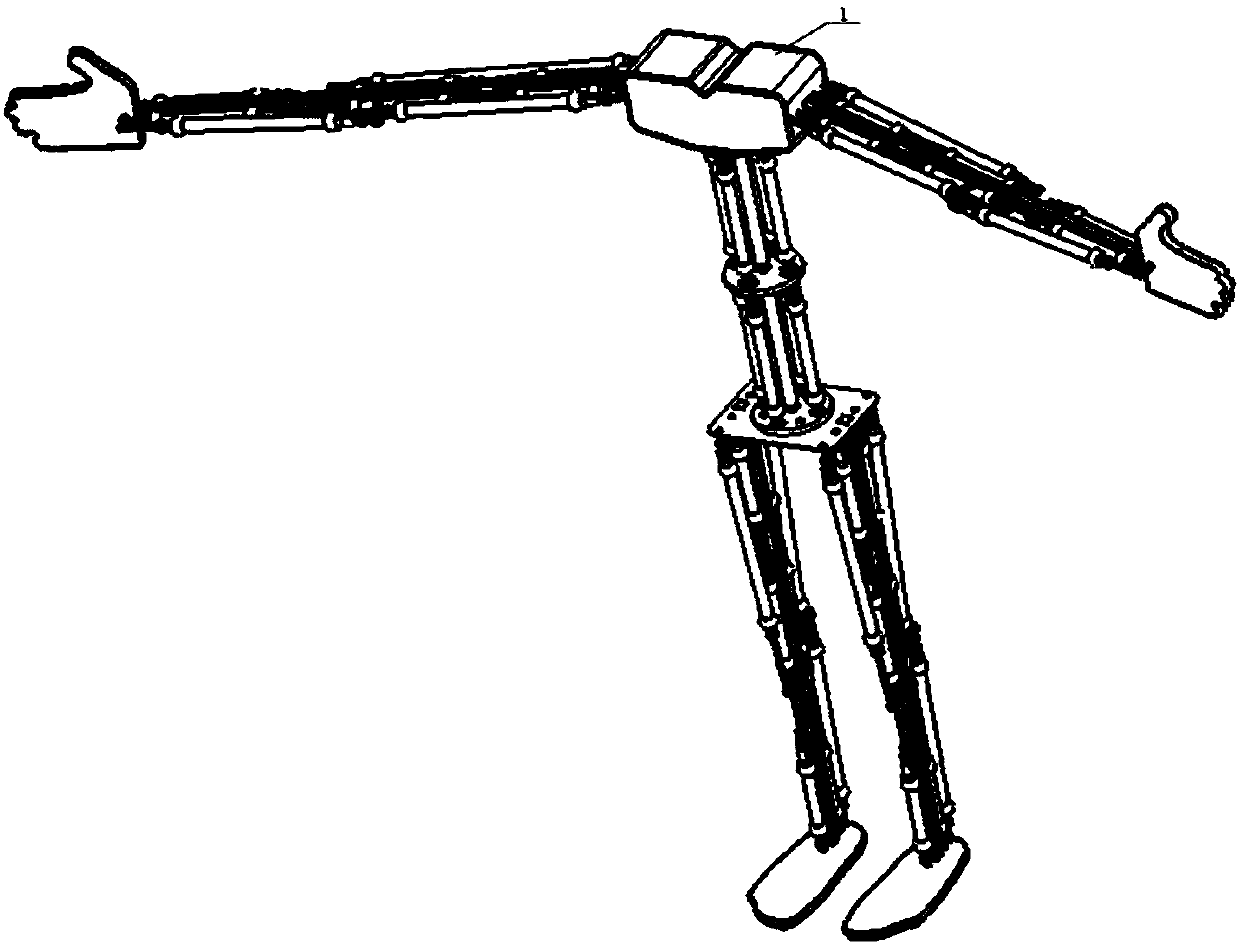
[0029] Such as figure 1 , 2 , shown in 3, 4, humanoid robot system based on pneumatic muscle of the present invention comprises shoulder 1, left arm, right arm, waist, lower limbs, and left arm, right arm, waist are all connected with shoulder by ball joint; It is connected with the waist through a ball hinge;
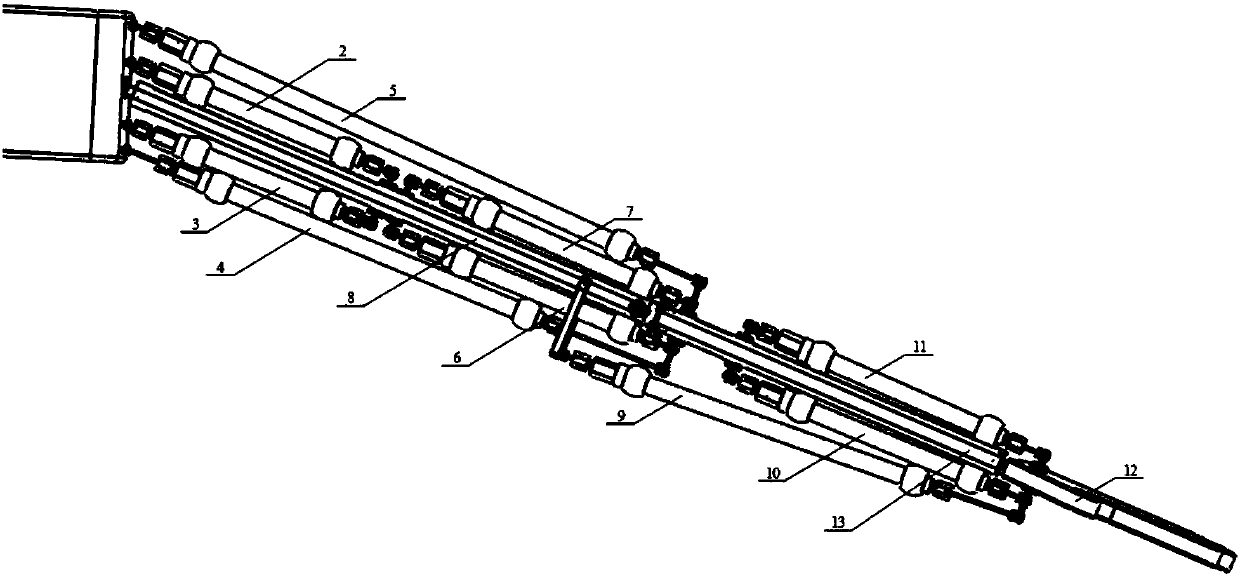
[0030] The left arm includes teres major 2, pectoralis major 3, biceps brachii 4, triceps longus 5, brachioradialis 6, anconeus 7, humerus 8, brachialis 9, flexor carpi radialis 10, radial Lateral wrist extensor 11, hand 12, ulna 13;
[0031] Teres major 2, anconeus 7, triceps longus 5, extensor carpi radialis 11 on the side of humerus 8 and ulna 13, pectoralis major 3, biceps brachii 4, brachioradialis 6, brachialis 9. The flexor carpi radialis 10 is located on the other side of the humerus 8 and the ulna 13;
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More