

Robot based on rigid and flexible pneumatic element fusion, control system and control method
A pneumatic component and control system technology, applied in the field of robotics, can solve problems such as the limitation of movement space and freedom of movement, change of joint friction coefficient, unfavorable joint servo control, etc., and achieve the effect of compact structure, increased degree of freedom, and increased quantity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
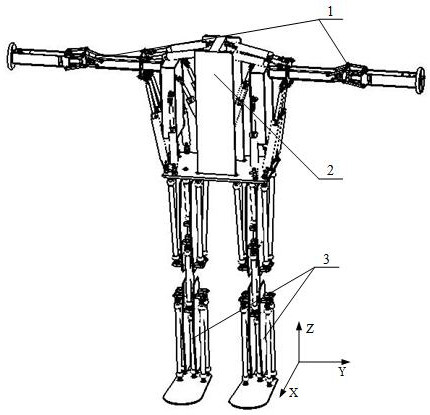
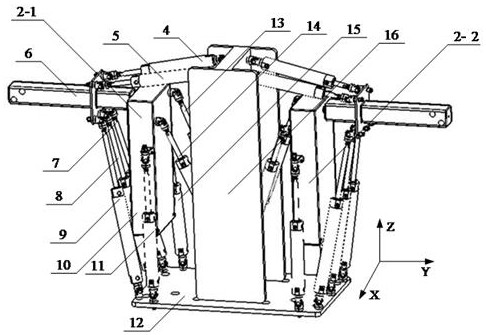
[0034] Example 1: as figure 1 ,2 , 3, 4, 5, and 6, the robot based on the fusion of rigid and flexible pneumatic components includes a double upper limb system 1, a thoracic joint system 2, and a double lower limb system 3. The thoracic joint system 2 includes the middle bone 16 and is located around the middle bone 16. The left thoracic joint 2-1 and the right thoracic joint 2-2 on both sides, and the structure of the left thoracic joint 2-1 and the right thoracic joint 2-2 are exactly the same. The double lower limb system 3 includes a left lower limb 3-1 and a right lower limb 3-2, and the structure of the left lower limb 3-1 and the right lower limb 3-2 is exactly the same.
[0035] like figure 2 , 3 As shown, the middle bone 16 is fixedly connected with the lower bottom plate 12 . Cylinder six 11, cylinder nine 15 two ends are rotatably connected with side bone 10, lower base plate 12 respectively, and cylinder six 11 is on the front side, cylinder nine 15 is on the r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More