Humanoid robot based on pneumatics
A robot and pneumatic muscle technology, applied in the field of robotics, can solve problems such as not being able to truly reflect the movement characteristics of human joint muscles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
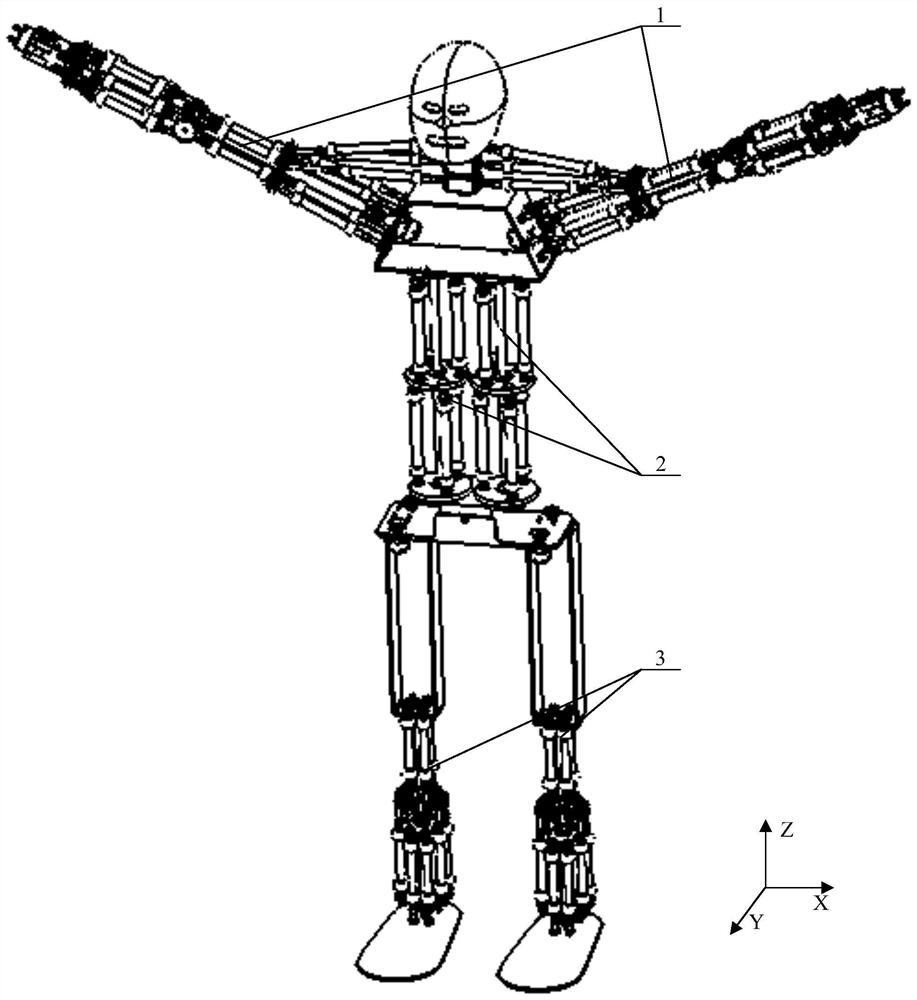
[0047] A pneumatic-based humanoid robot comprising:
[0048] Waist joint 2, upper limb joints 1 that are mirror images of each other are arranged on both sides of waist joint 2, and lower limb joints 3 that are mirror images of each other are arranged on both sides of the lower part, and the upper part of the chest connecting piece 16 of waist joint 2 can be rotatably connected to neck vertebra 3 64 in turn , neck vertebra 2 63, neck vertebra 1 62, head 61;
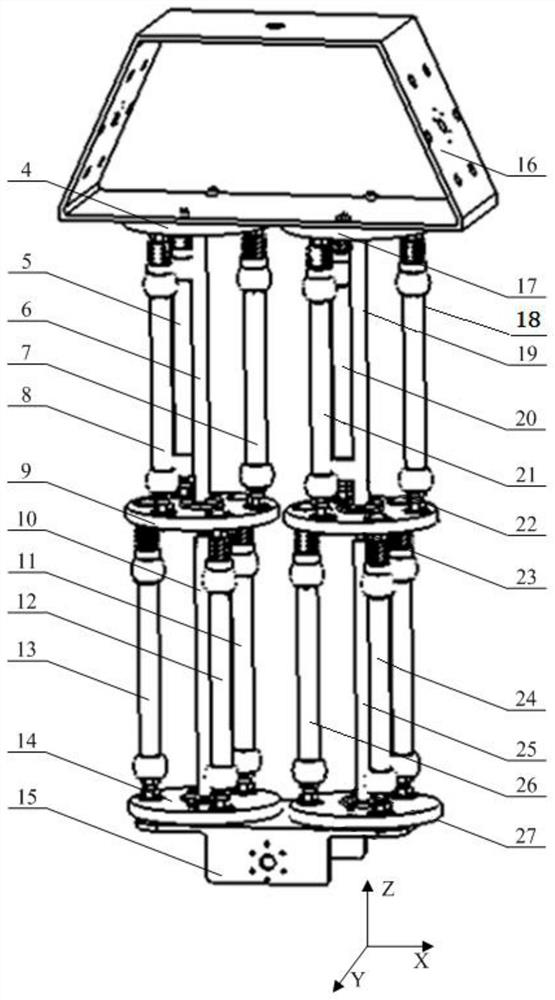
[0049] Both sides below the chest connector 16 are respectively fixedly connected connecting plate one 4 and connecting plate four 17, and connecting plate one 4 is respectively rotatably connected with pneumatic muscle one 5, middle pole one 6, pneumatic muscle two 7, pneumatic muscle three 8, and pneumatic muscle two. Muscle 1 5, pneumatic muscle 2 7, and pneumatic muscle 3 8 are respec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More