

A Stability Control Method for Car-Following Model Based on Subjective Danger Perception
A car-following model and stability technology, applied in the fields of adaptive cruise control and automatic driving, can solve the problems of vehicle system perception errors affecting vehicle decision-making and affecting the stability of vehicle queues, so as to prevent traffic congestion and uniform traffic flow. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0024] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
[0025] The present invention introduces a synovial film control strategy to stabilize the stability of the queue based on the expected safety margin car-following model in consideration of disturbances in vehicle information. The specific steps are as follows:
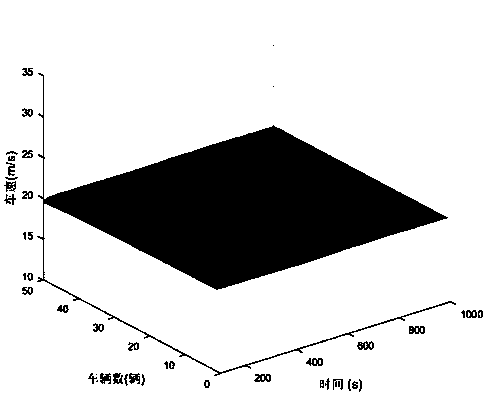
[0026] (1) Establish a DSM car-following model considering the perceptual safety margin disturbance level:
[0027]
[0028] In the formula, α is the driver’s response sensitivity coefficient, v n (t) is the speed of vehicle n at time t, l is the length of the vehicle, x n(t) is the position of vehicle n at time t, SMD is the driver’s expected safety margin, d is the maximum braking acceleration of the vehicle, ξ is the system disturbance level, a n (t) is the acceleration of vehicle n at time t, and τ is the response time of the vehicle system.
[0029] (2) Design synovium contr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More