

Formation flying spacecraft back-stepping sliding-mode control method
A formation flying, backstepping sliding mode technology, applied in attitude control, adaptive control, general control system and other directions, can solve the problem of difficult to expand the limited time coordination control of formation flying spacecraft
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
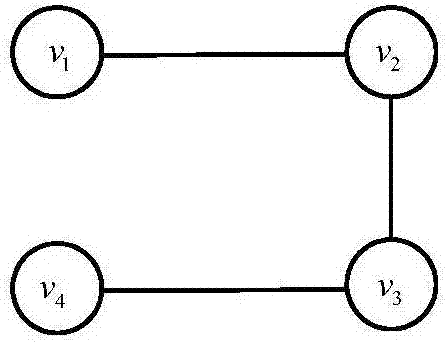
[0230] For bounded external disturbances, a backstepping sliding mode control method for formation flying spacecraft
[0231] (1) Establish the attitude dynamic model of formation flight spacecraft
[0232] Since the spacecraft is modeled as a rigid body, it is described by a rotation matrix:
[0233] R i is the rotation matrix that transforms the body coordinate system into the inertial coordinate system, ω i ∈ R 3×1 is the angular velocity in the body coordinate system, u i ∈ R 3×1 and d i ∈ R 3×1 are the control torque and external disturbance torque, respectively, J i ∈ R 3×3 is the inertia matrix, and the dynamic equation describing the attitude of the spacecraft is as follows:
[0234]
[0235]
[0236] (2) Introduce spacecraft attitude error
[0237] R d ∈SO(3) and ω d ∈ R 3×1 is the reference attitude and angular velocity in the reference coordinate system, and are the rotation matrix error and the angular velocity error, respectively, and due to...
Embodiment 2
[0369] Embodiment 2 For external disturbances with unknown boundaries, the backstepping sliding mode control method of formation flying spacecraft
[0370] (1) Establish the attitude dynamic model of formation flight spacecraft
[0371] Since the spacecraft is modeled as a rigid body, it is described by a rotation matrix:
[0372] R i is the rotation matrix that transforms the body coordinate system into the inertial coordinate system, ω i ∈R 3×1 is the angular velocity in the body coordinate system, u i ∈R 3×1 and d i ∈R 3×1 are the control torque and external disturbance torque, respectively, J i ∈R 3×3 is the inertia matrix, and the dynamic equation describing the attitude of the spacecraft is as follows:
[0373]
[0374]
[0375]
[0376] (2) Introduce spacecraft attitude error
[0377] R d ∈SO(3) and ω d ∈R 3×1 is the reference attitude and angular velocity in the reference coordinate system, and are the rotation matrix error and the angular vel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More