

Mems Gyro Sliding Mode Chattering Suppression Method Based on Disturbance Observer
A technology that interferes with observers and gyroscopes. It is applied in the direction of gyroscope effect for speed measurement, gyroscope/steering sensing equipment, instruments, etc., and can solve problems such as poor practicability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
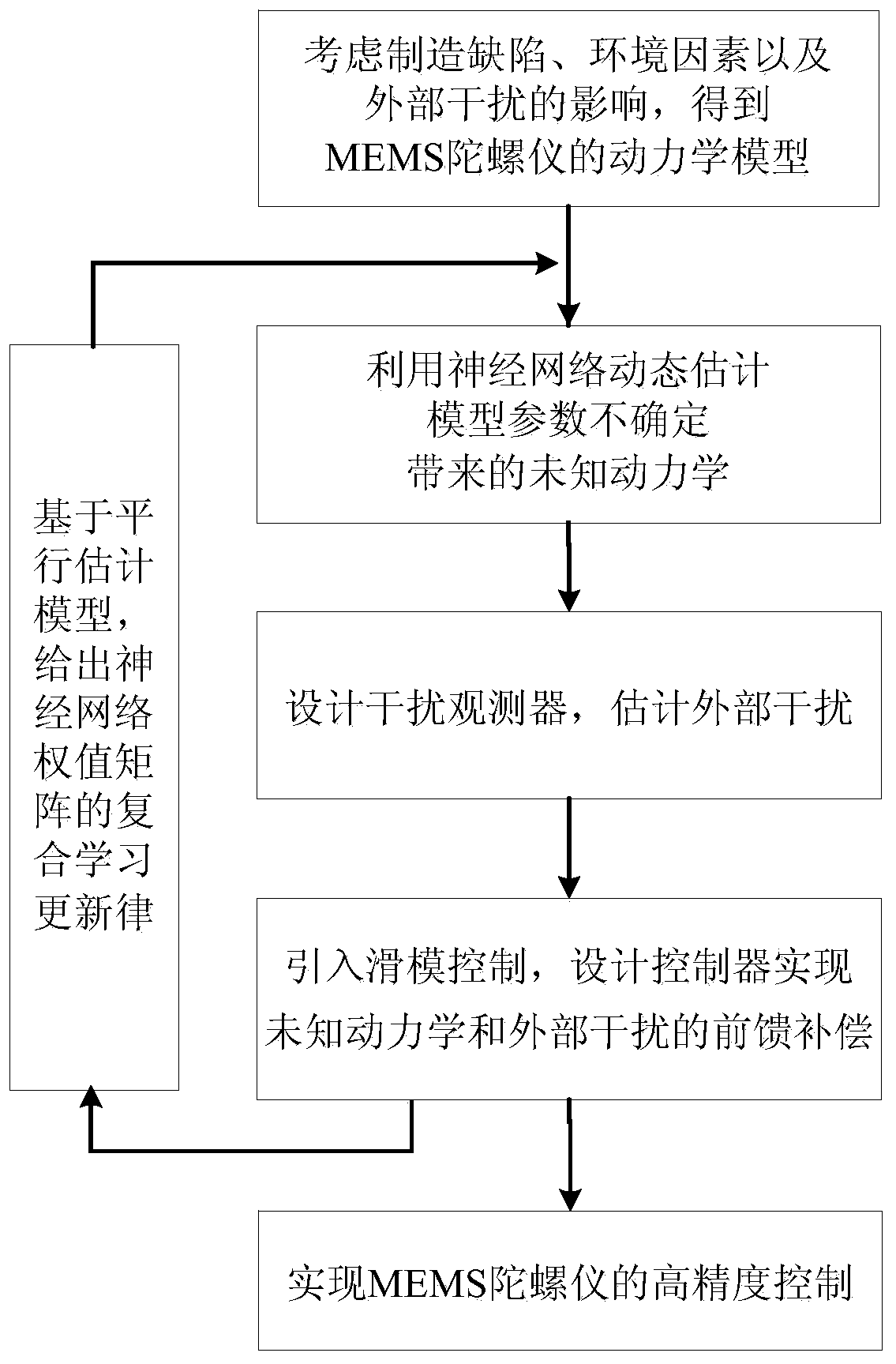
[0073] Reference figure 1 . The specific steps of the MEMS gyroscope sliding mode chattering suppression method based on the interference observer of the present invention are as follows:
[0074] (a) The dynamic model of the MEMS gyroscope considering the orthogonal error is:
[0075]
[0076] Among them, m is the quality of the test mass; Ω z Enter the angular velocity for the gyro; Is the electrostatic driving force; x * They are the acceleration, velocity and displacement of the MEMS gyroscope detection mass along the drive shaft; y * They are the acceleration, velocity and displacement of the test mass along the test axis; d xx , D yy Is the damping coefficient; k xx , K yy Is the stiffness coefficient; d xy Is the damping coupling coefficient, k xy Is the stiffness coupling coefficient.
[0077] In order to improve the accuracy of mechanism analysis, the MEMS gyroscope dynamic model is processed without dimension. Take dimensionless time Then divide both sides of equati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More