

MEMS(Micro-electromechanical System) gyroscope sliding mode control method based on disturbance observer
A technology of disturbance observer and control method, which is applied in the direction of adaptive control, general control system, control/regulation system, etc., and can solve problems such as poor practicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
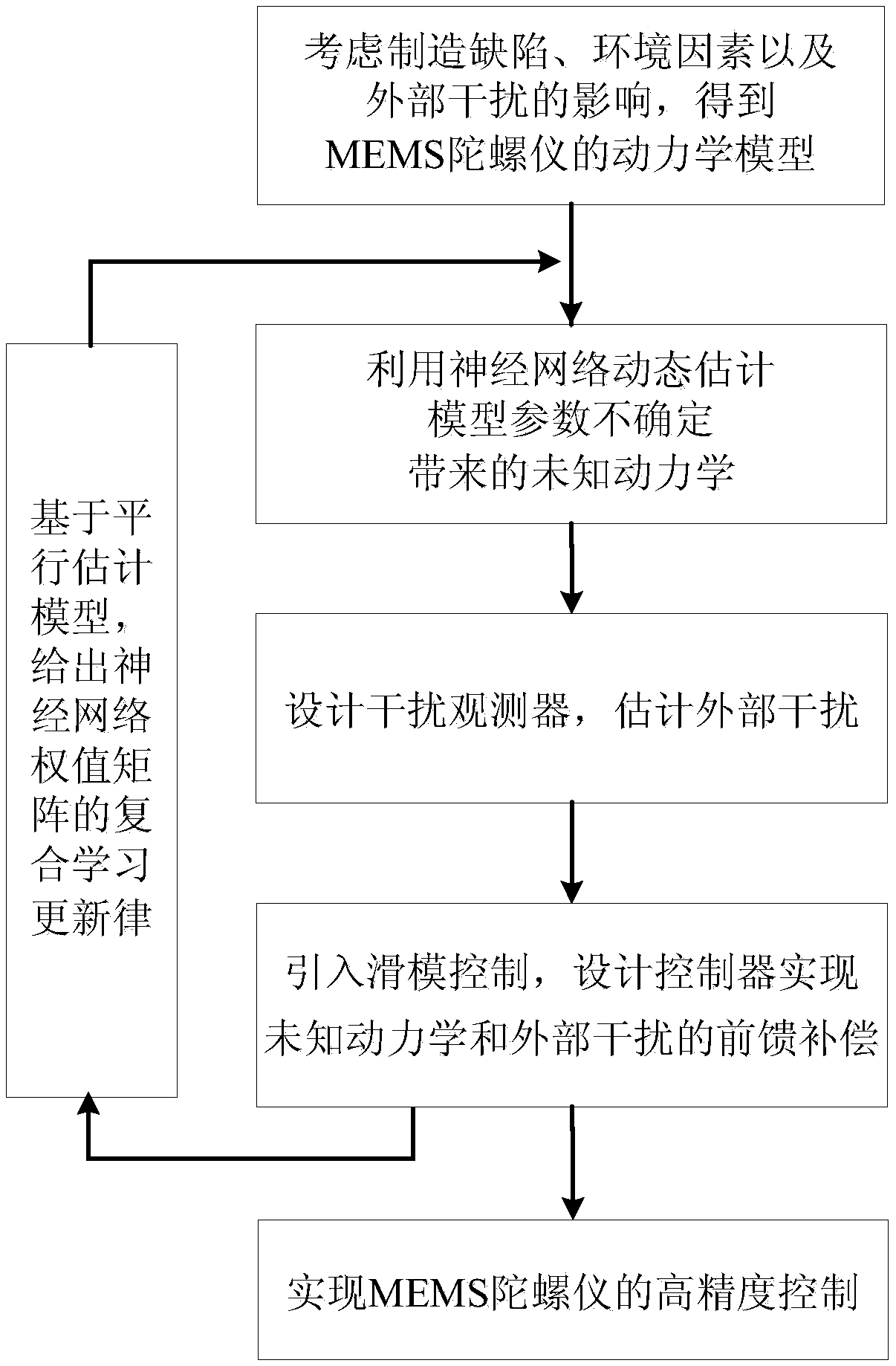
[0066] refer to figure 1 . The specific steps of the MEMS gyro sliding mode control method based on the disturbance observer of the present invention are as follows:
[0067] (a) The dynamic model of the MEMS gyroscope considering the quadrature error is:
[0068]
[0069] Among them, m is the mass of proof mass; Ω z Input the angular velocity for the gyro; is the electrostatic driving force; x * are the acceleration, velocity and displacement of the MEMS gyroscope proof mass along the drive axis; the y * are the acceleration, velocity and displacement of the proof mass along the detection axis; d xx , d yy is the damping coefficient; k xx , k yy is the stiffness coefficient; d xy is the damping coupling coefficient, k xy is the stiffness coupling coefficient.
[0070] In order to improve the accuracy of mechanism analysis, the MEMS gyroscope dynamic model is dimensionless. Take the dimensionless time t * = ω o t, and then divide both sides of equation ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More