

Nonlinear robust control method with finite-time convergence capacity for unmanned helicopter attitude error
An unmanned helicopter, limited time technology, applied in the direction of attitude control, etc., can solve the problems of not considering the unmodeled dynamics and external disturbances, the difficulty of establishing and updating the fuzzy rule base, and the experimental effect is not obvious.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0131] The present invention aims at the deficiency of aforementioned unmanned helicopter attitude control, has analyzed the dynamic characteristic of this kind of unmanned helicopter, on this basis, has designed a kind of novel nonlinear robust attitude control method based on self-adaptive sliding mode, utilizes Based on the Lyapunov stability analysis method, it is proved that the designed controller can make the attitude tracking control of the unmanned helicopter converge in a limited time, and finally its real-time flight control experiment is given.
[0132] 1. Dynamic model of small unmanned helicopter
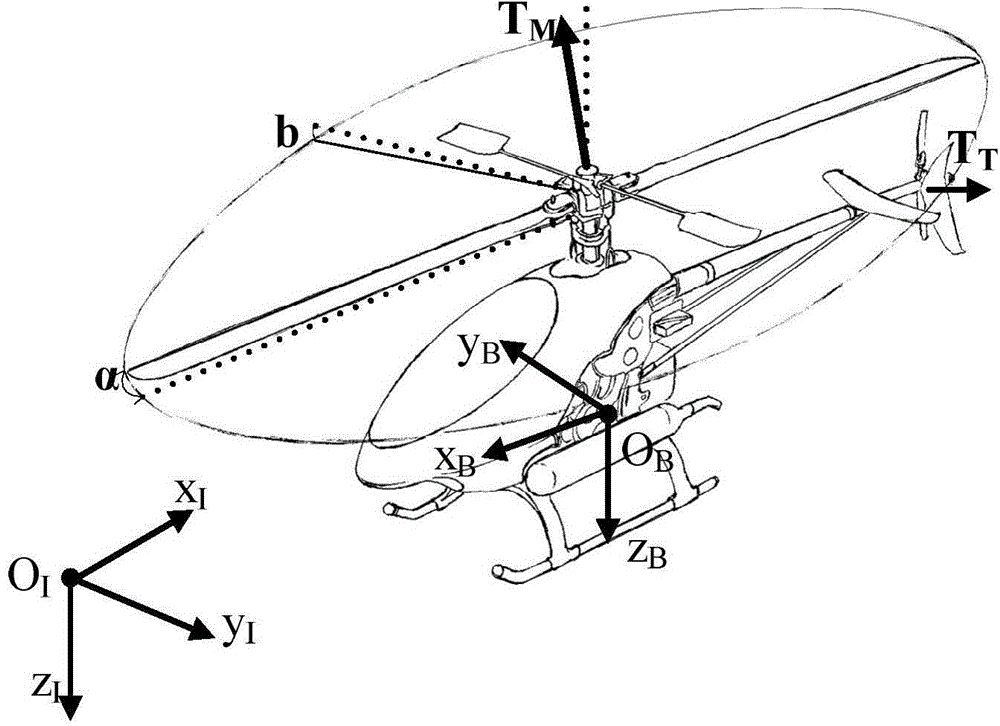
[0133] During the flight, the small unmanned helicopter itself can complete the rotation in three directions of pitch, roll and yaw, so it involves the earth coordinate system {O I ,x I ,y I ,z I} and body coordinate system {O B ,x B ,y B ,z B}'I' represents the inertial coordinate system, 'B' represents the body coordinate system, and the origin O I Fixed to a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More