

Control method for changing structure of underwater hiding-machine space based on recursion fuzzy neural network
A fuzzy neural network and variable structure control technology, applied in the control field, can solve the problems of weakened robustness of the joint control system, not considering the motion coupling effect, and not yet being applied.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention is described in more detail below in conjunction with accompanying drawing example:
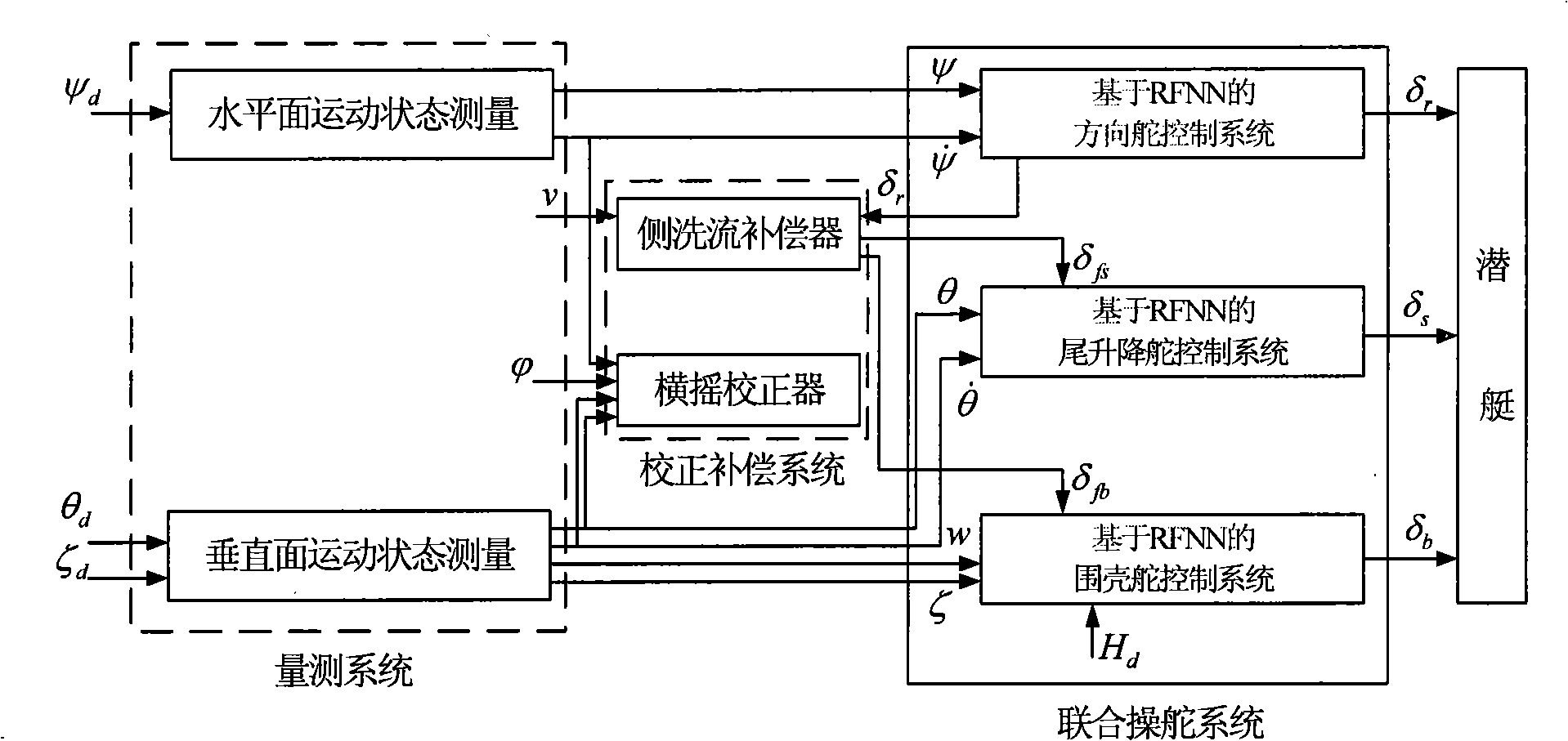
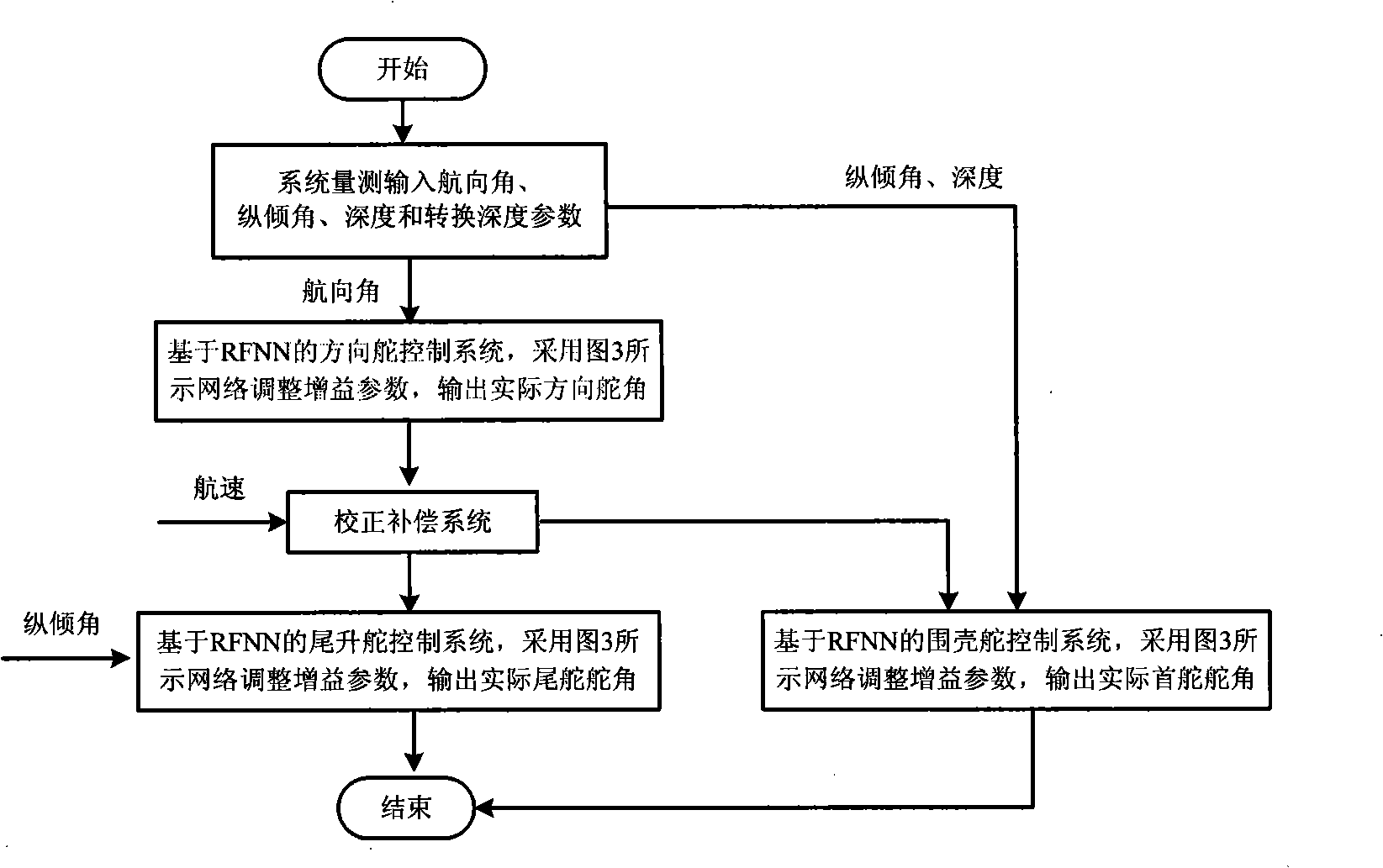
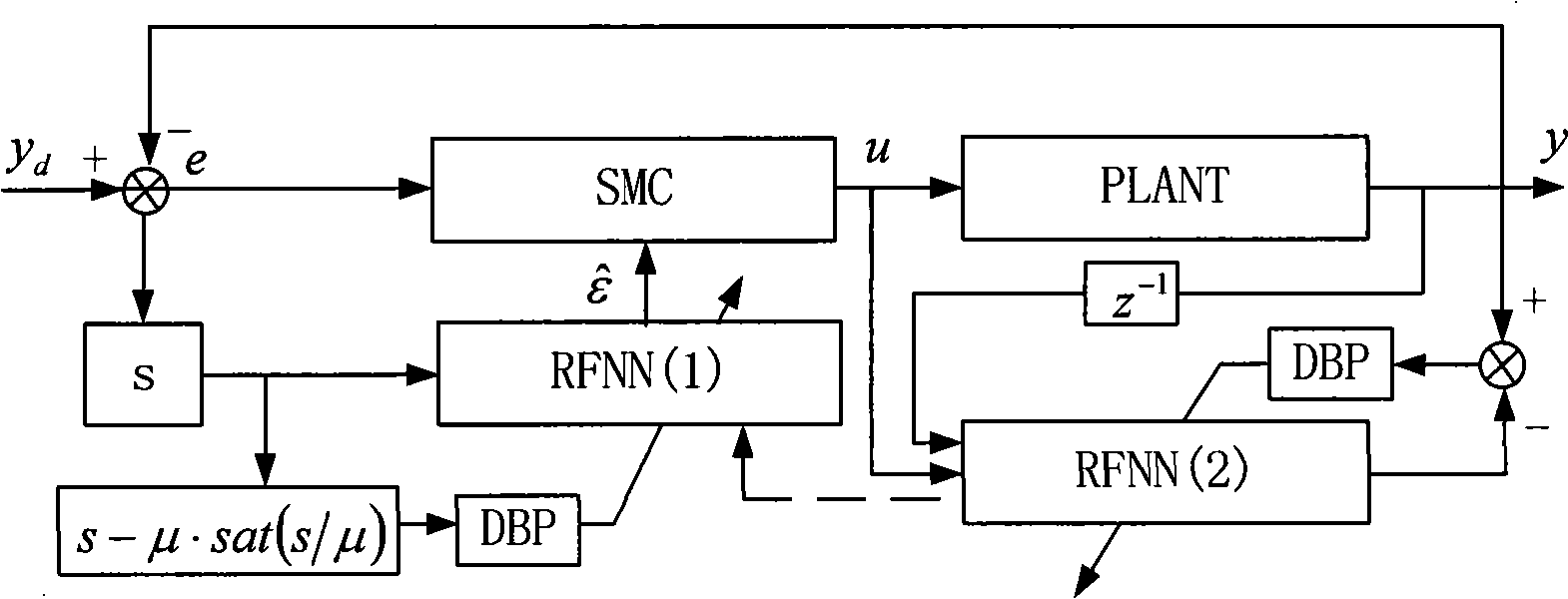
[0025] 1) Design of RFNN variable structure controller for rudder heading control
[0026] The horizontal motion of the underwater submersible includes axial motion, lateral motion and rolling motion, and their motion equations are defined as follows:
[0027] Axial equation: u = U 0 ( 1 - e - 0.52 / | ψ · | L )
[0028] (1)
[0029] m = [ v · + ur ] = 1 2 ρ L ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More