

Nonlinear control method for the suspension and transportation system of rotor UAV
A quadrotor UAV hanging, quadrotor UAV technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as stability analysis and convergence proof are not given
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
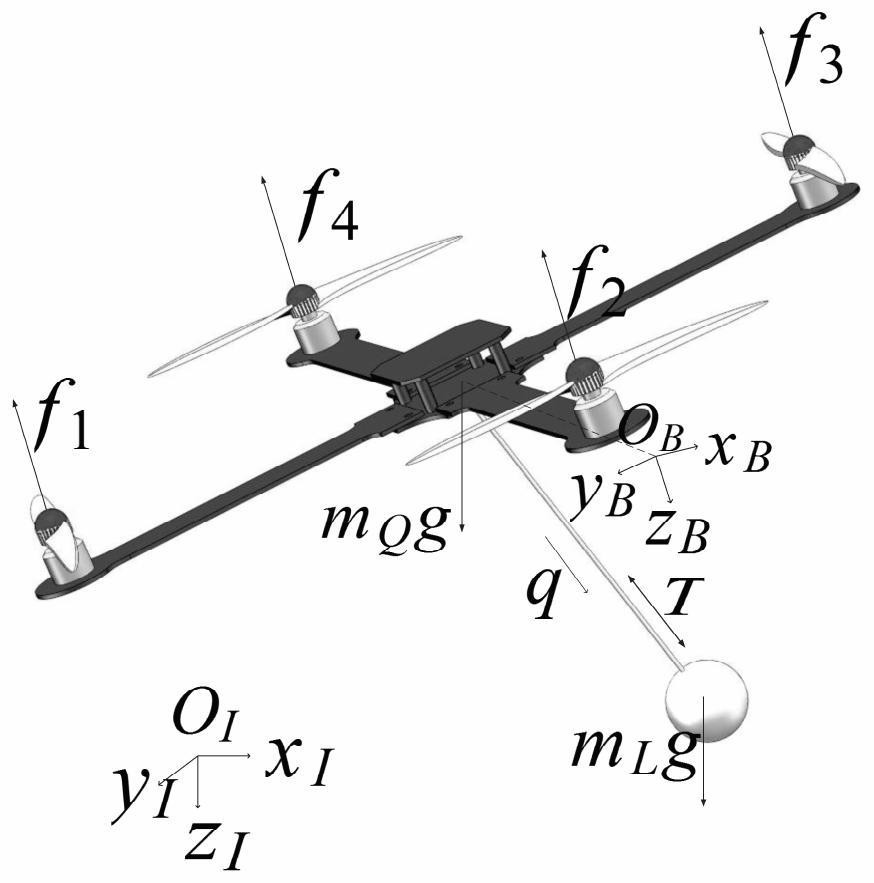
[0070] In order to overcome the deficiencies in the prior art, the present invention aims to propose a nonlinear self-adaptive robust control method based on the energy method, so as to control the position of the quadrotor UAV under the condition that some parameters of the system are unknown. effectively suppress the swing of the suspended load in flight. The technical solution adopted in the present invention is that the control method of the four-rotor UAV hanging flight system based on the energy method is implemented on the UAV equipped with a sling for lifting objects. Fu equation, and then design the controller to realize the control of the UAV. The further specific steps are: firstly, through the force analysis of the UAV and the hanging object during the flight of the quadrotor UAV, respectively, so as to obtain the following: figure 1 The nonlinear dynamic model of the four-rotor UAV suspension flight process shown:
[0071]
[0072] The variables in formula (1)...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More