

Quad-rotor unmanned aerial vehicle hanging flight system control method based on energy method
A technology of quadrotor UAV and quadrotor aircraft, which is applied in the direction of non-electric variable control, attitude control, control/adjustment system, etc., can solve the problems such as stability analysis and convergence proof that are not given, and achieve good swing reduction effect of effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The technical problem to be solved by the present invention is to propose a nonlinear controller based on the energy method, which can control the position of the quadrotor UAV while better suppressing the swing of the hanging load in flight.
[0049] The technical scheme adopted in the present invention is: design the Lyapunov equation based on the energy function method, and then design the controller to realize the control target, including the following steps:
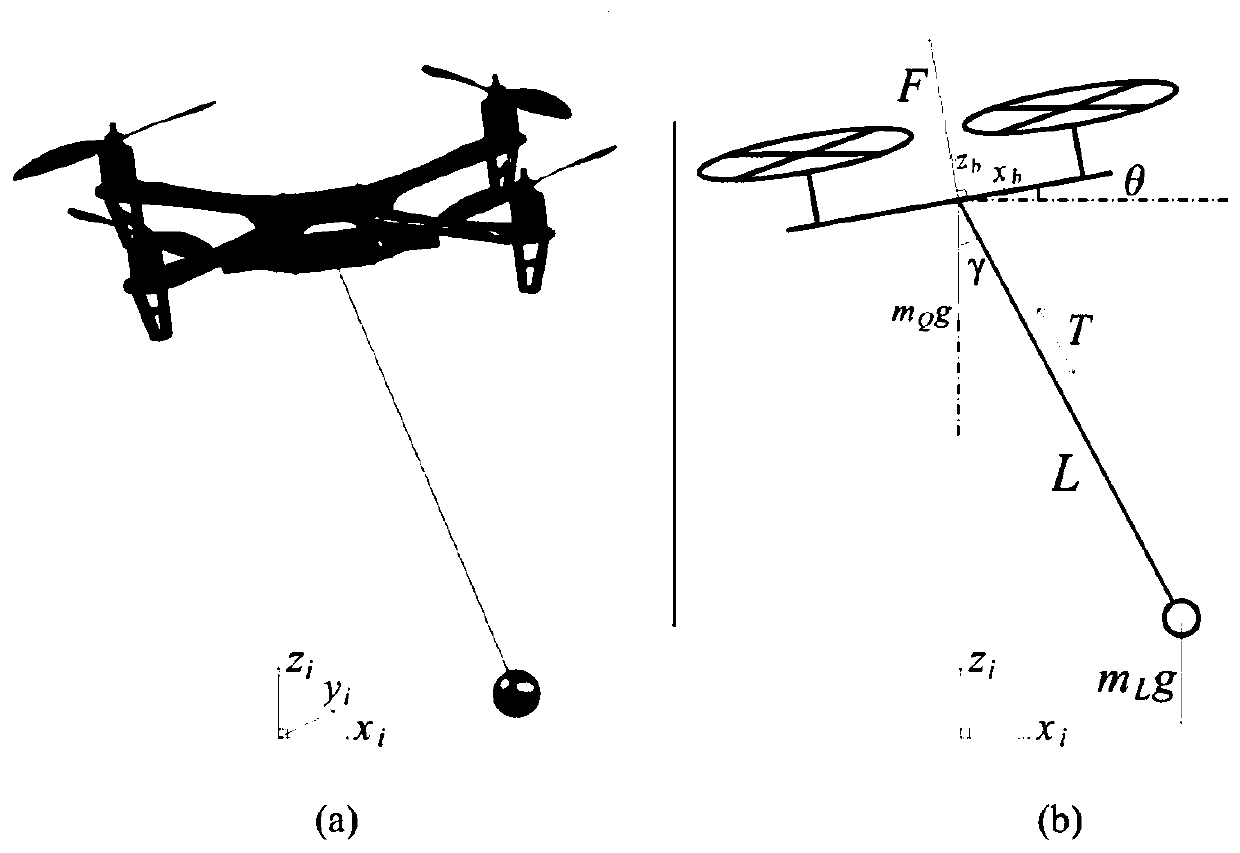
[0050] Firstly, the force analysis of the UAV and the hanging object during the hanging flight of the quadrotor UAV is carried out separately, so as to obtain the nonlinear dynamic model of the hanging flight process of the quadrotor UAV:
[0051]
[0052] The variables in formula (1) are defined as follows: m Q and m L are the mass of the quadrotor UAV and the load, L is the length of the rope, γ is the angle between the rope and the vertical direction, g is the acceleration of gravity, (x Q ,z Q ) is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More