

Real-time construction method based on sparse-slam
An algorithm and image pyramid technology, applied in 3D modeling, image analysis, image data processing, etc., can solve the problems of large data volume and application platform dependence, so as to save time, reduce calculation amount, and optimize the mapping process Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
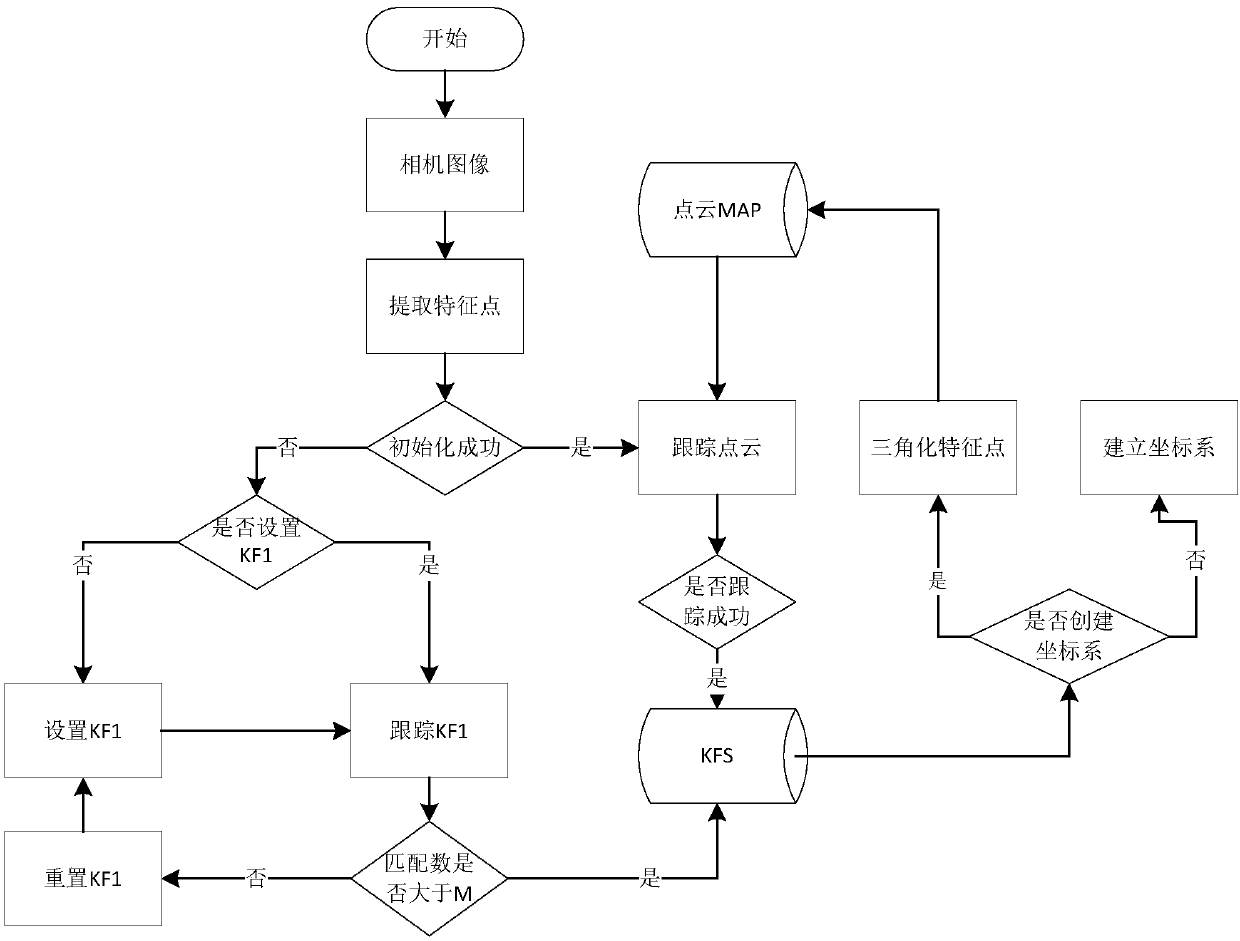
[0025] Such as figure 1 As shown, the real-time mapping method based on sparse-slam disclosed in the present invention includes the following two threads running in parallel:
[0026] Thread 1, track and extract key frames, the specific steps are:
[0027] Step 1.1, constructing an N-layer image pyramid for the input initial frame, and extracting each feature point in the initial frame image pyramid, setting the initial frame KF1 including the initial frame image pyramid and each feature point, considering time and effect, this embodiment where N=4;
[0028] Step 1.2, construct an N-layer image pyramid for the newly input current frame, and extract each feature point in the current frame image pyramid, and then use the SSD algorithm to track each feature point in the initial frame KF1 in the current frame, and the SSD algorithm formula is :
[0029] D=∑((I ki -u k )-(I ci -u c )) 2
[0030] In the formula, I ki Indicates the pixel value of the i-th feature point in t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More