Automatic rotary clamping device for industrial robot
An industrial robot, automatic rotation technology, applied in the direction of chucks, manipulators, manufacturing tools, etc., can solve the problems of complex automatic rotation of manipulators, not applicability, increase production costs, etc., to avoid multi-joint adjustment and coordination complex adjustment, reduce mechanical Transmission, effect of large annular torque
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
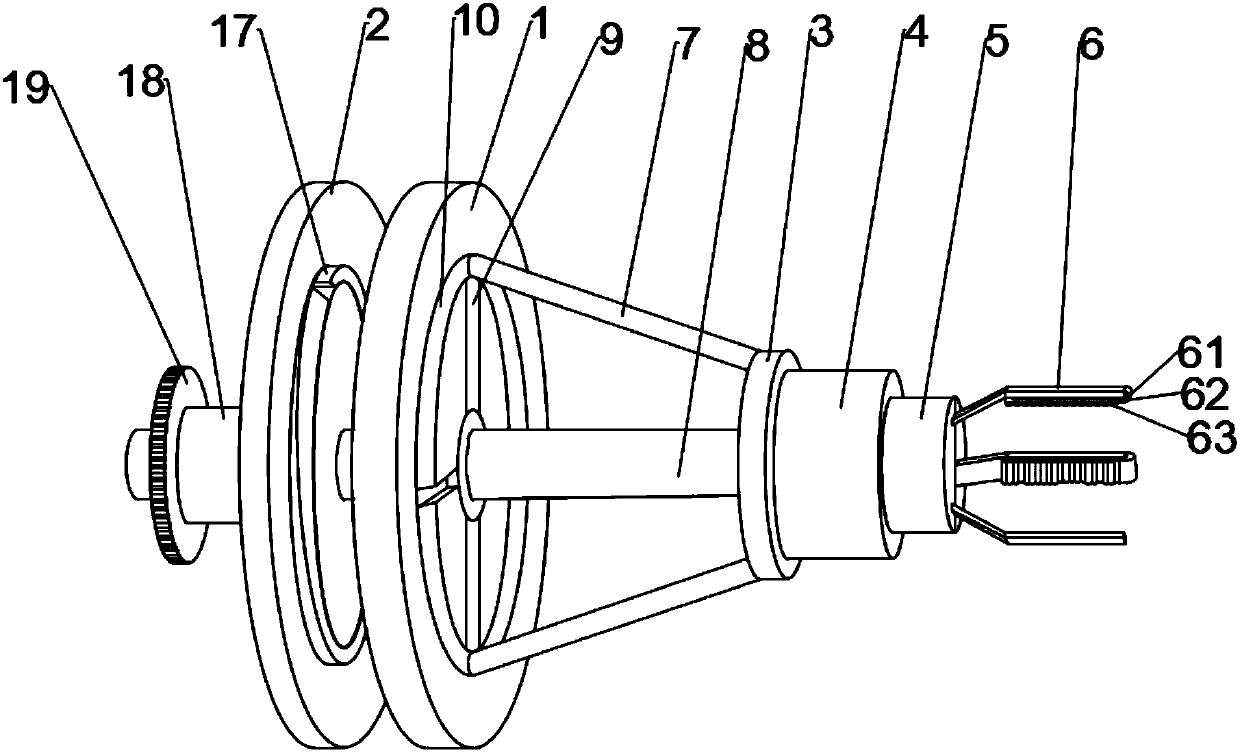
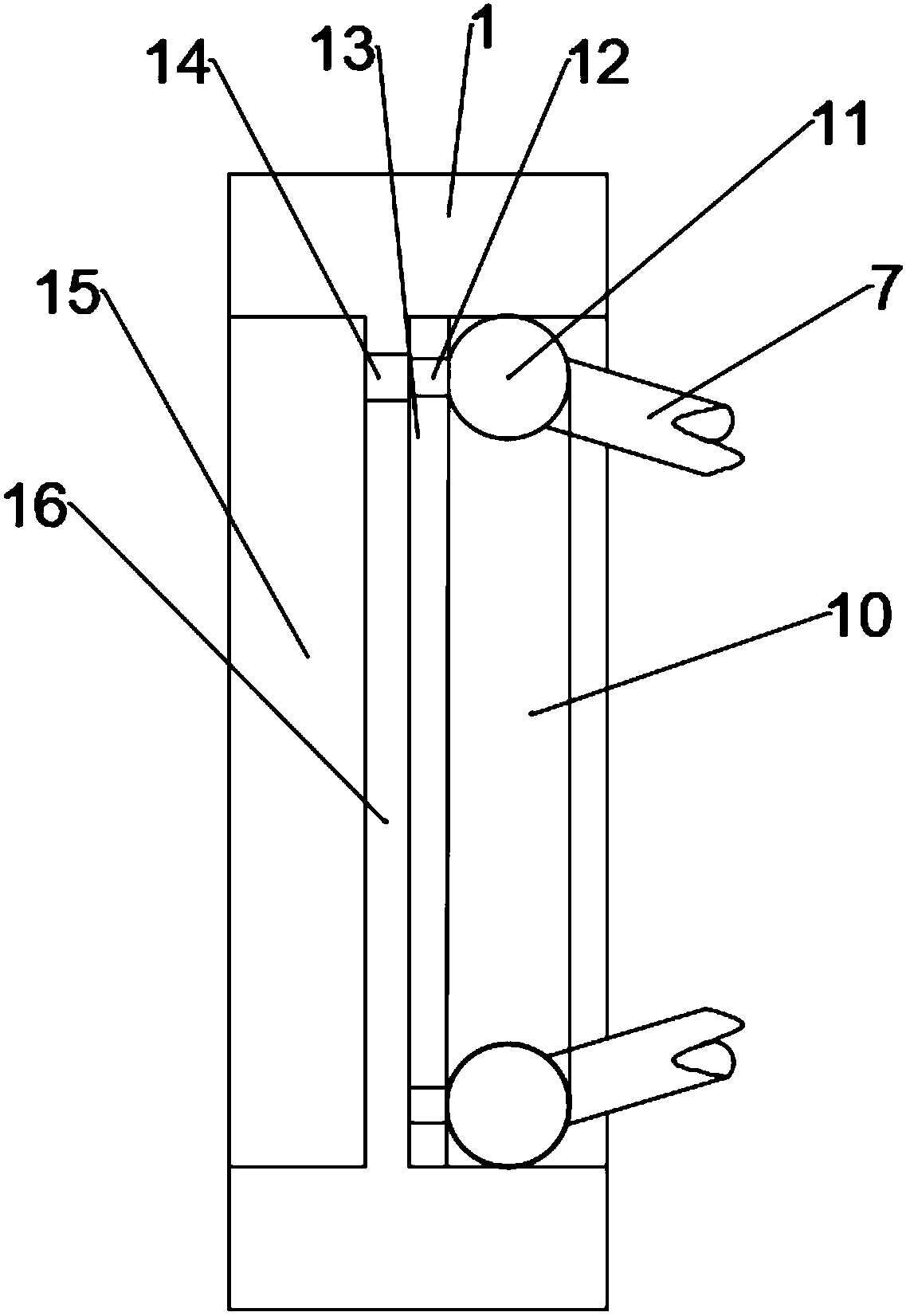
[0021] Such as figure 1 and figure 2 As shown, the present invention provides an automatic rotary clamping device for an industrial robot, comprising a rotary displacement seat 1, an adjusting plate 2, a fixed seat 3 and a main control shaft 8, and the main control shaft 8 passes through the rotary displacement seat transversely 1 and the mobilizing plate 2, the fixed seat 3 is connected to the rotary displacement seat 1 through the connecting rod 7, the end of the main control shaft 8 is fixedly connected to the fixed seat 3, and the left side of the fixed seat 3 is equipped with a rotary hydraulic device 4, The rotary hydraulic device 4 is connected with a rack mechanical driving device 5, and a claw arm 6 is installed on the rack mechanical driving device 5, and an auxiliary micro-motor rotating device 61 is arranged at the end of the claw arm 6, and the micro-motor The rotating device 61 is connected with an auxiliary claw 62, and the surface of the auxiliary claw 62 is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More