

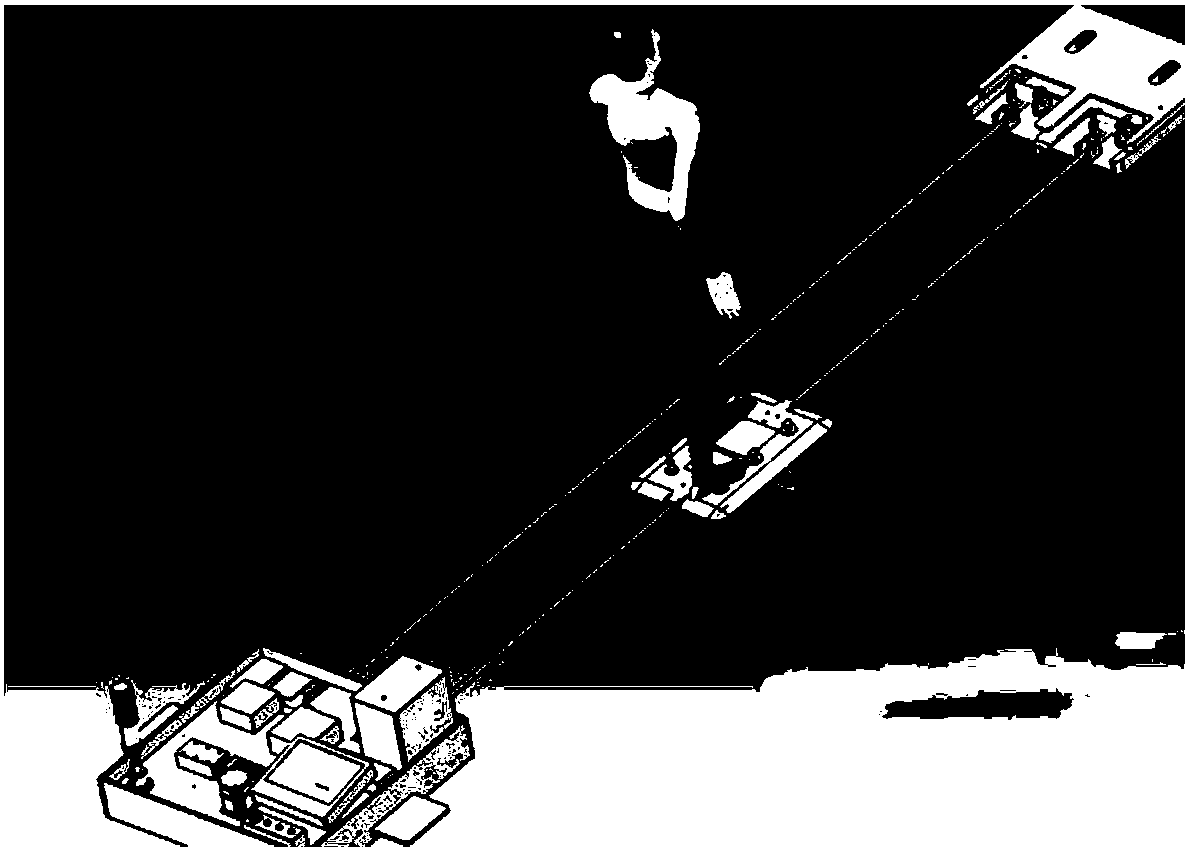
Pedestrian AEB (Autonomous Emergency Braking) system test platform
A system test and pedestrian technology, applied in vehicle test, machine/structural component test, measuring device, etc., can solve the problem that the arm of the pedestrian model cannot swing naturally, cannot protect pedestrians well, and cannot simulate pedestrian walking characteristics, etc. problem, to achieve accurate pedestrian protection design basis and improve the effect of bio-simulation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
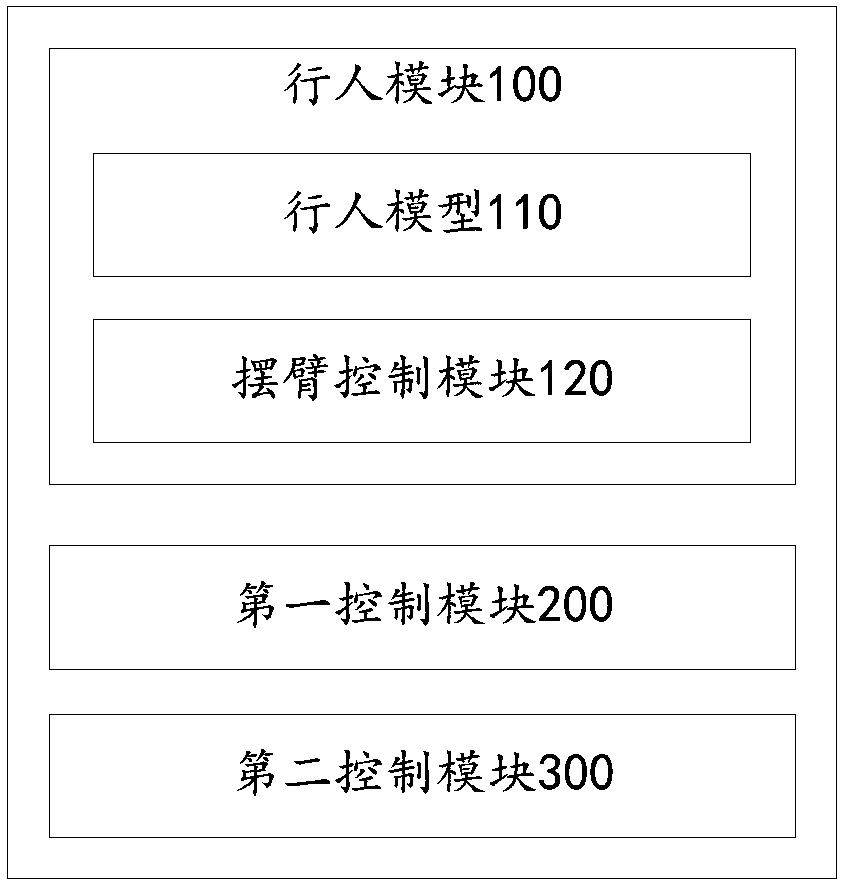
[0056] figure 2 It is a structural block diagram of the pedestrian AEB system test platform provided by an embodiment of the present invention, such as figure 2 As shown, the embodiment of the present invention provides a pedestrian AEB system test platform, including a pedestrian module 100 , a first control module 200 and a second control module 300 , and the pedestrian module 100 includes a pedestrian model 110 and a swing arm control module 120 .
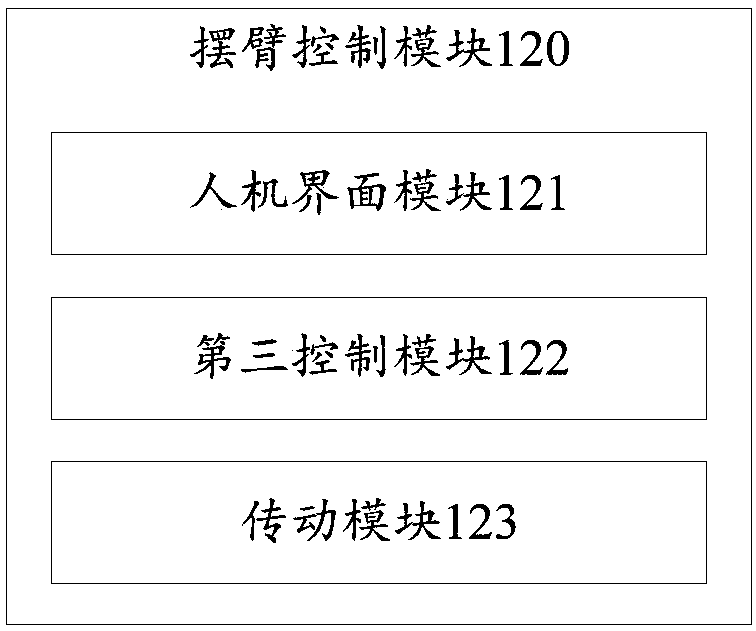
[0057] The arm swing control module 120 is used to control the arm swing of the pedestrian model 110, image 3 is a structural block diagram of the swing arm control module provided by an embodiment of the present invention, such as image 3 As shown, the swing arm control module 120 includes a man-machine interface module 121 , a third control module 122 and a transmission module 123 .
[0058] The man-machine interface module 121 is used to receive the user's operation information and send the operation information to the ...
Embodiment 2
[0073] figure 2 It is a structural block diagram of the pedestrian AEB system test platform provided by an embodiment of the present invention, such as figure 2 As shown, the pedestrian AEB system test platform provided in this embodiment includes a pedestrian module 100, a first control module 200 and a second control module 300,
[0074] The pedestrian module 100 includes a pedestrian model 110 and a swing arm control module 120, the swing arm control module 120 is used to control the arm swing of the pedestrian model 110;
[0075] Figure 8 is a structural block diagram of the swing arm control module provided by another embodiment of the present invention, such as Figure 8 As shown, the swing arm control module 120 includes a man-machine interface module 121, a third control module 122, a transmission module 123, a first upper limit sensor 124, a second upper limit sensor 125, a first lower limit sensor 126 and a second upper limit sensor 126. Two lower limit sensors...
Embodiment 3
[0092] Figure 9 It is a structural block diagram of the pedestrian AEB system test platform provided by another embodiment of the present invention, such as Figure 9 As shown, the pedestrian AEB system test platform provided in this embodiment includes a pedestrian module 100, a first control module 200, a second control module 300, a first emergency stop module 400, a second emergency stop module 500 and indicator lights.
[0093] The pedestrian module 100 includes a pedestrian model 110 and a swing arm control module 120, the swing arm control module 120 is used to control the arm swing of the pedestrian model 110;
[0094] The first control module 200 is used to tow the test vehicle along the first path according to the first motion parameters, and activate the second control module 300 according to the preset collision parameters; the first motion parameters include the test vehicle position, speed, and direction information;
[0095] The second control module 300 is u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More