

A behavior control method of yellow peach core-digging robot based on deep reinforcement learning
A technology of reinforcement learning and robotics, applied in the direction of program control manipulators, instruments, manipulators, etc., can solve problems such as inability to fully guarantee the quality of digging cores, difficult behavior strategy control, and difficulty in recruiting people in canning factories
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The specific embodiments discussed are merely illustrative of implementations of the invention, and do not limit the scope of the invention. Embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
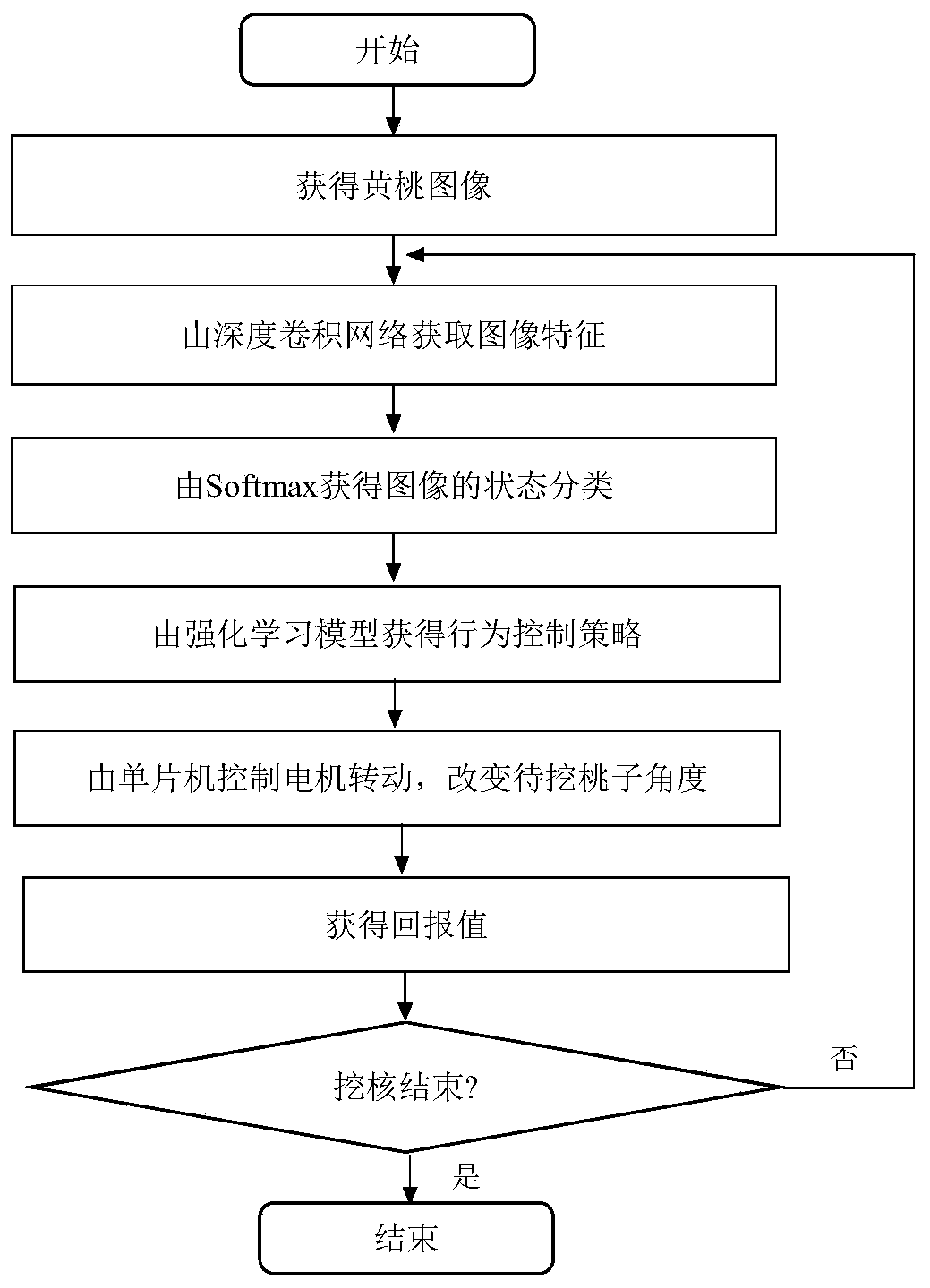
[0040] The overall process of the algorithm is as follows figure 1 shown. The details will be described below.
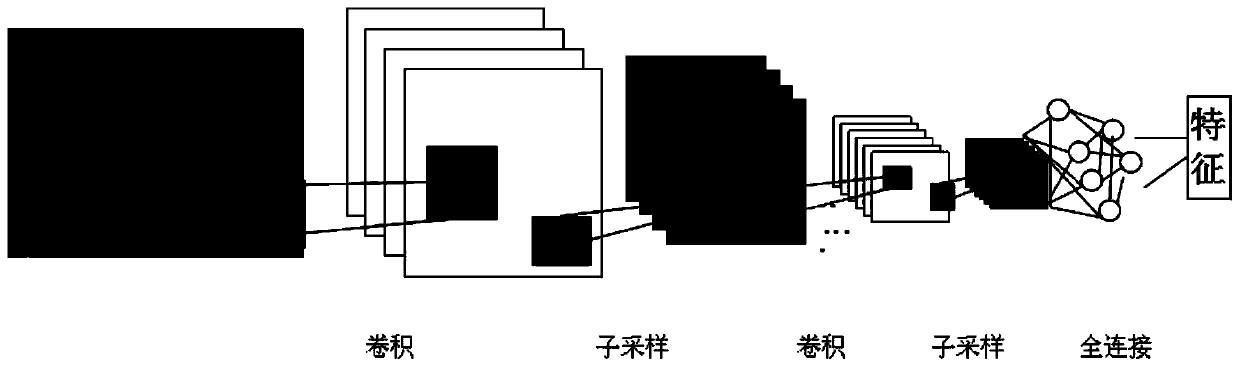
[0041] 1. Feature extraction.
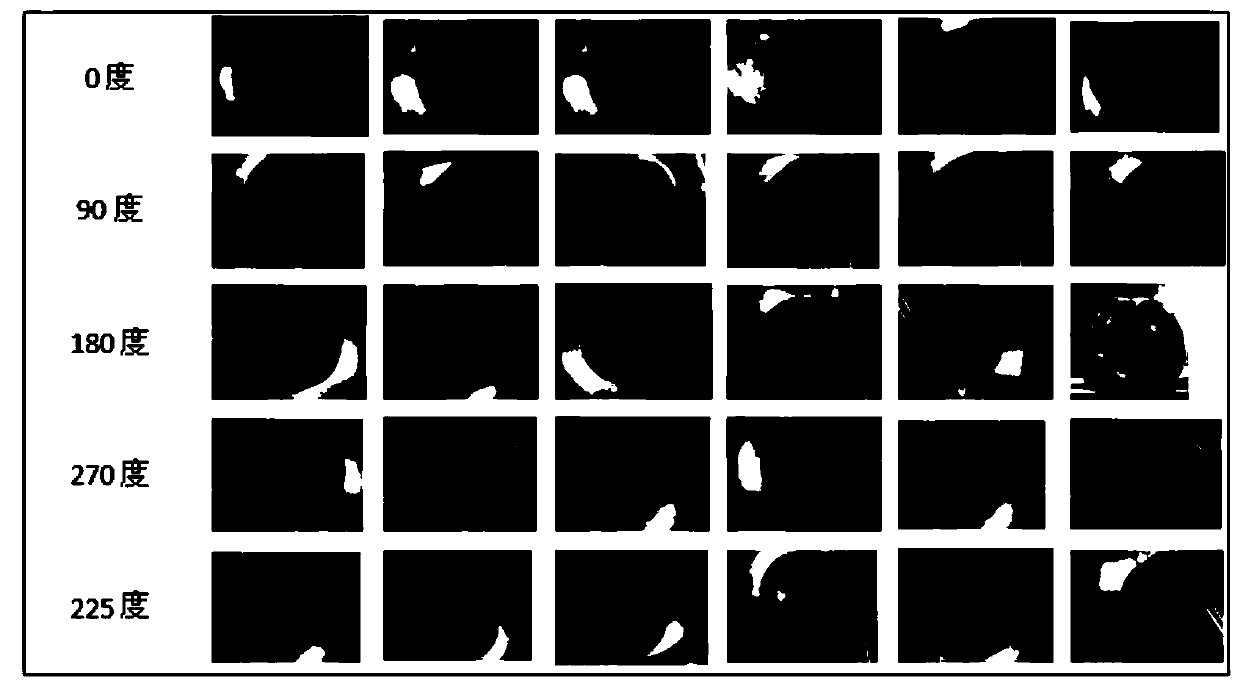
[0042] Create a training set and a test set. Among them, 10,000 yellow peach profiles are used as the training set, which are divided into 360 categories (each category has a 1° rotation angle), and the test set contains 500 yellow peach profiles. The images in the training and test sets are labeled. The walnut state is obtained using a convolutional neural network (CNN) with 5 layers. In order to train the CNN model under the caffe platform, the yellow peach profiles are encoded continuously through a unified naming method, and the original data is converted into t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More