

Method and chip for robot monitoring pets based on grid map
A grid map and robot technology, applied in the field of robots, can solve the problems of affecting the monitoring effect and not being able to determine the monitoring position well
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
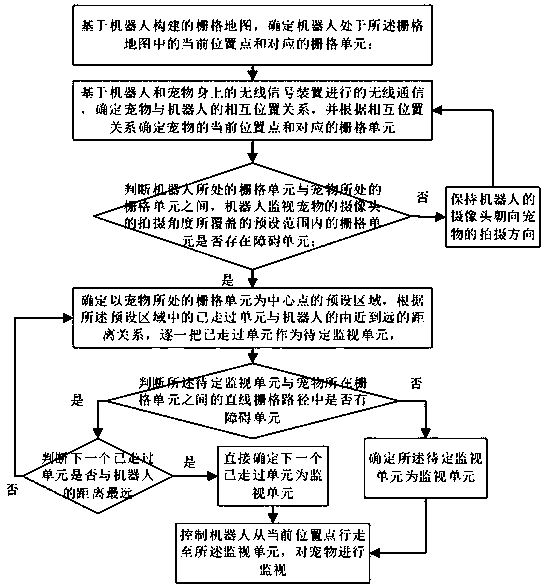
[0078] The specific embodiment of the present invention will be further described below in conjunction with accompanying drawing:
[0079] The robot described in the present invention is a kind of intelligent household appliances, which can automatically walk in certain occasions by virtue of certain artificial intelligence. The body of the robot is equipped with various sensors, which can detect the walking distance, walking angle, body status and obstacles, etc. If it encounters a wall or other obstacles, it will turn by itself and take different routes according to different settings , walking in a planned manner, and constructing a grid map based on various data detected during the walking process. The mobile robot of the present invention includes the following structure: a robot body with driving wheels capable of autonomous walking, a human-computer interaction interface is provided on the body, and an obstacle detection unit is provided on the body. There is a camera ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More