

A flexible manipulator based on shape memory alloy
A technology of memory alloys and manipulators, applied in the field of flexible manipulators, to achieve the effects of increasing power, reducing response time, and increasing maximum output force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
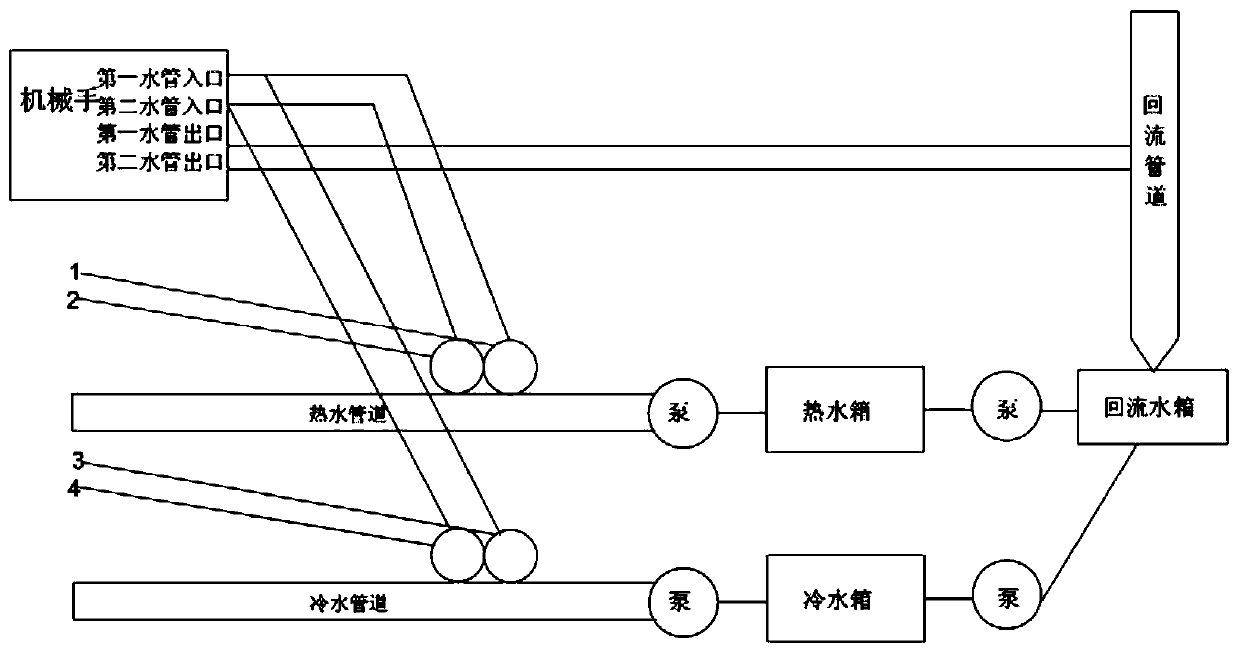
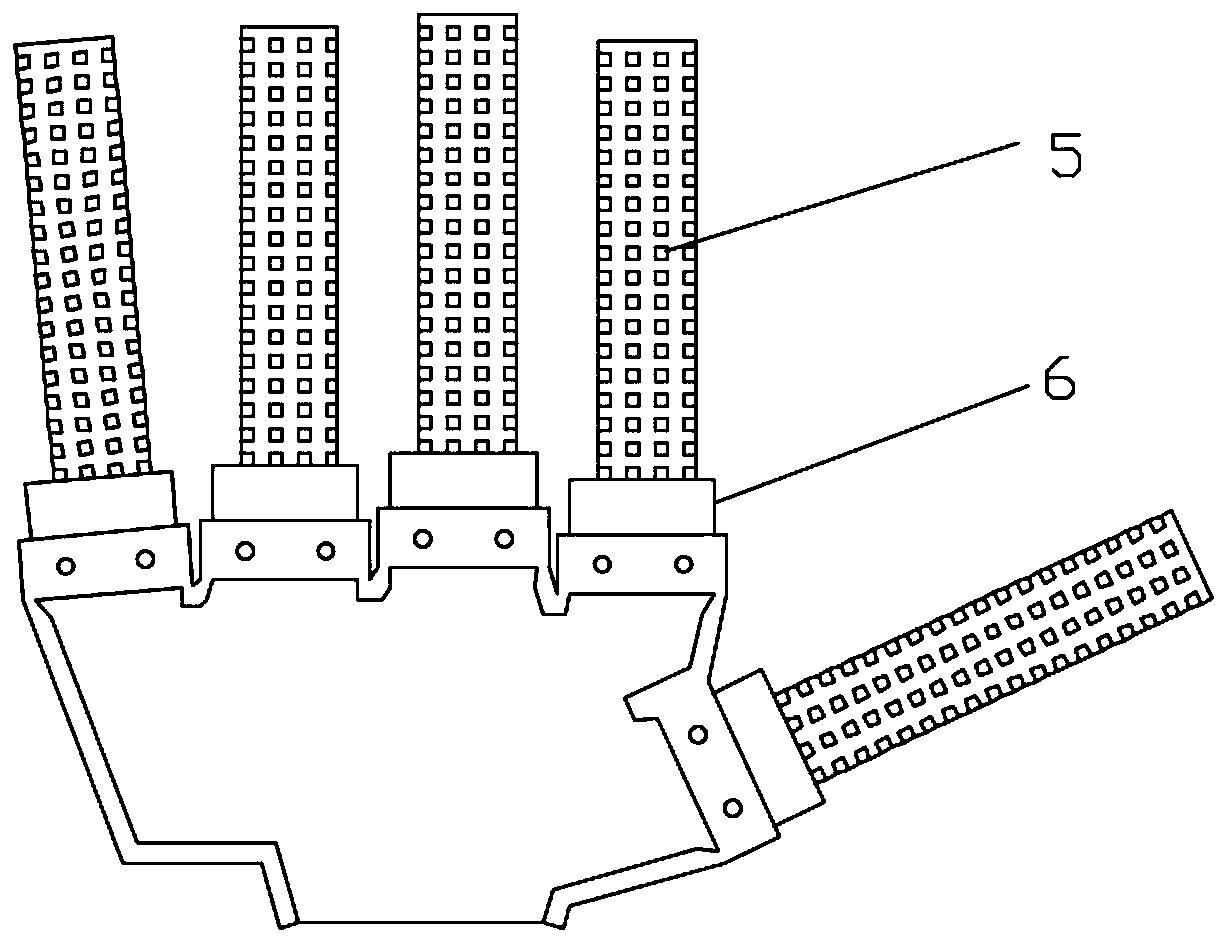
[0024] The flexible manipulator based on the shape memory alloy proposed by the present invention has a structure such as figure 1 As shown, including manipulator, hot water tank, cold water tank and return water tank. The structure of the manipulator is as follows figure 2 Shown, comprise palm, finger 5 and finger fixing seat 6, finger 5 is relatively fixed with palm by finger fixing seat 6.
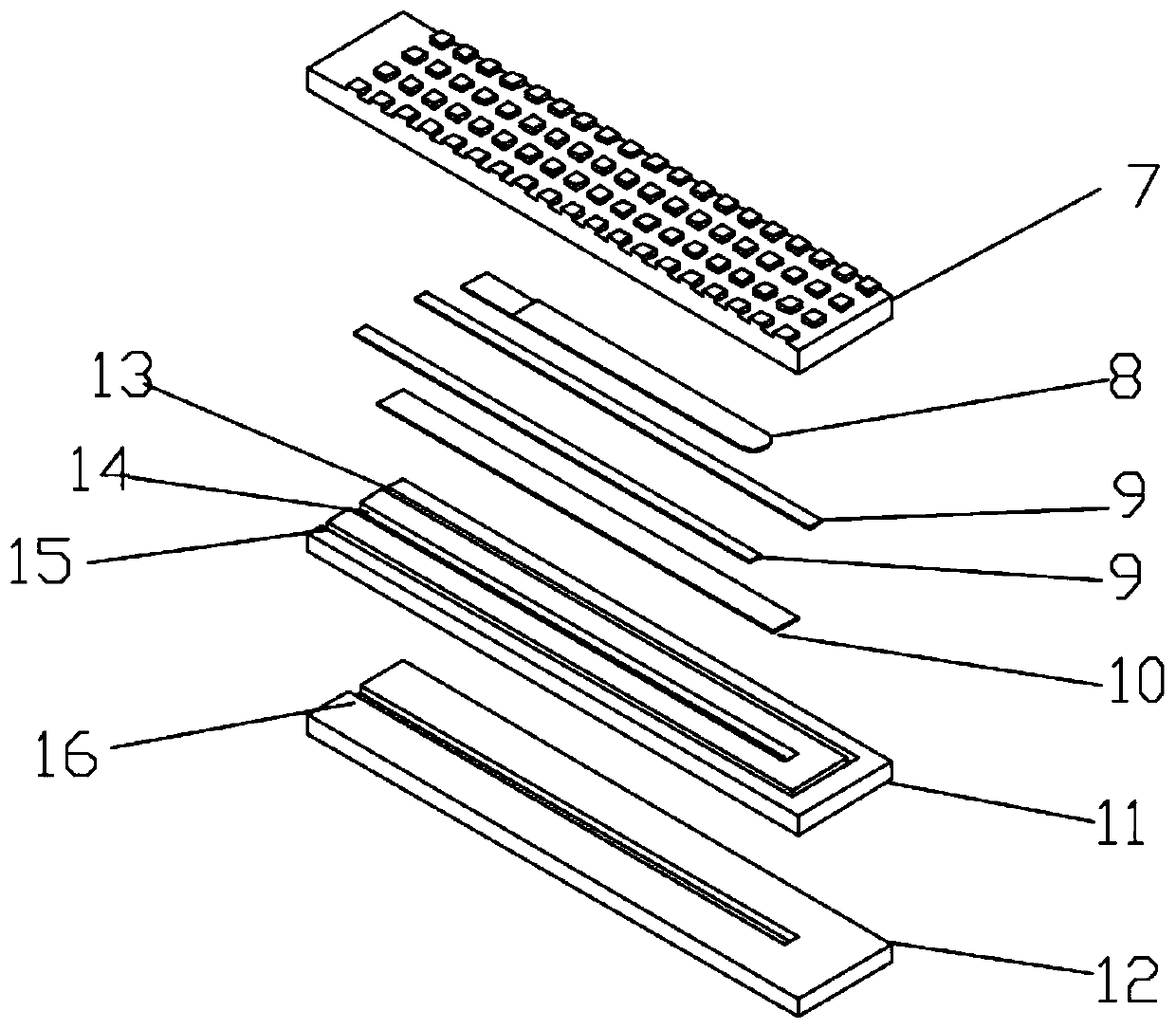
[0025] The structure of finger 5 is as image 3 As shown, the upper structural board 7 , the bending sensor 9 , the driving plate, the middle structural board 11 and the lower structural board 12 are sequentially laminated from top to bottom. The laminated upper structural board 7 , bending sensor 9 , driving piece, middle structural board 11 and bottom structural board 12 are laminated and inserted into the finger holder 6 .
[0026] The driving piece in the finger 5 is composed of two half-width memory alloy strips 9 for straightening and one full-width memory alloy strip 10 for s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More