Force-sensor-based flexible mechanical paw and using method
A mechanical gripper and flexible technology, applied in the field of mechanical structure, can solve the problems of difficult installation and maintenance, many parts and high production cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
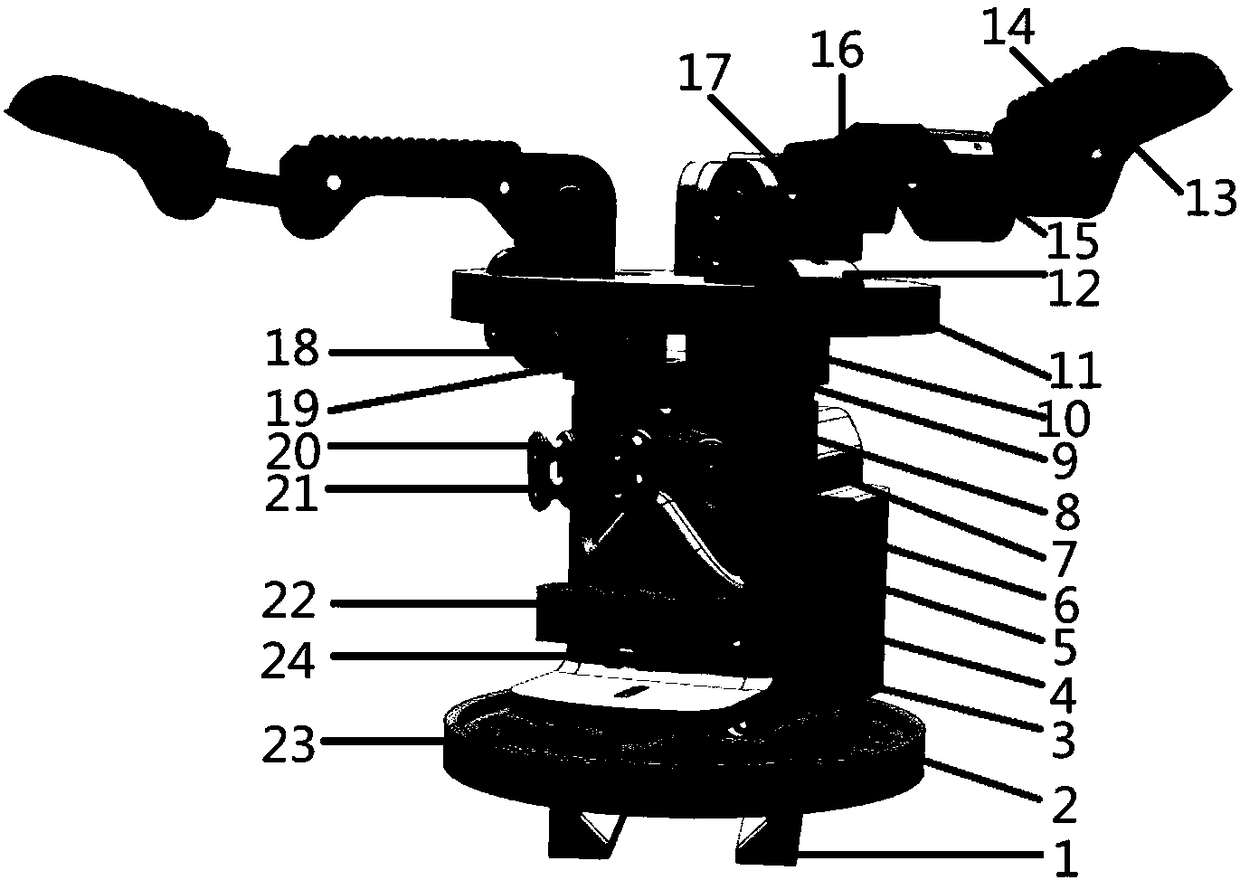
[0013] The mechanism principle and working principle of the present invention will be described in further detail below in conjunction with the accompanying drawings.
[0014] see figure 1 , the present invention is made up of several mechanisms.
[0015] Initialization process: Confirm that the installation is complete and the components are in good condition, and control the motor to reversely rotate at a certain angle so that the fingers can automatically return to their positions;
[0016] The grasping process adjusts the output torque of the steering gear through the pressure feedback of the finger surface, and the steering gear rotates to tighten the winch (5), so that the fixed pulley (7)-fixed pulley (8)-fixed pulley (23)-fixed rod ( 24) the tendon rope is tightened, thereby driving the transfer element (22) to move downward, and the downward movement of the transfer element (22) drives the synchronous downward movement of the three movable pulleys (20) (21) (6), and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More