

Parameter self-setting method of MISO full format model-free controller based on deviation information
A parameter self-tuning, model-free technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the unrealized penalty factor, affect the control effect of MISO full-format model-free controller, and lack of effective tuning means and other issues to achieve a good control effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
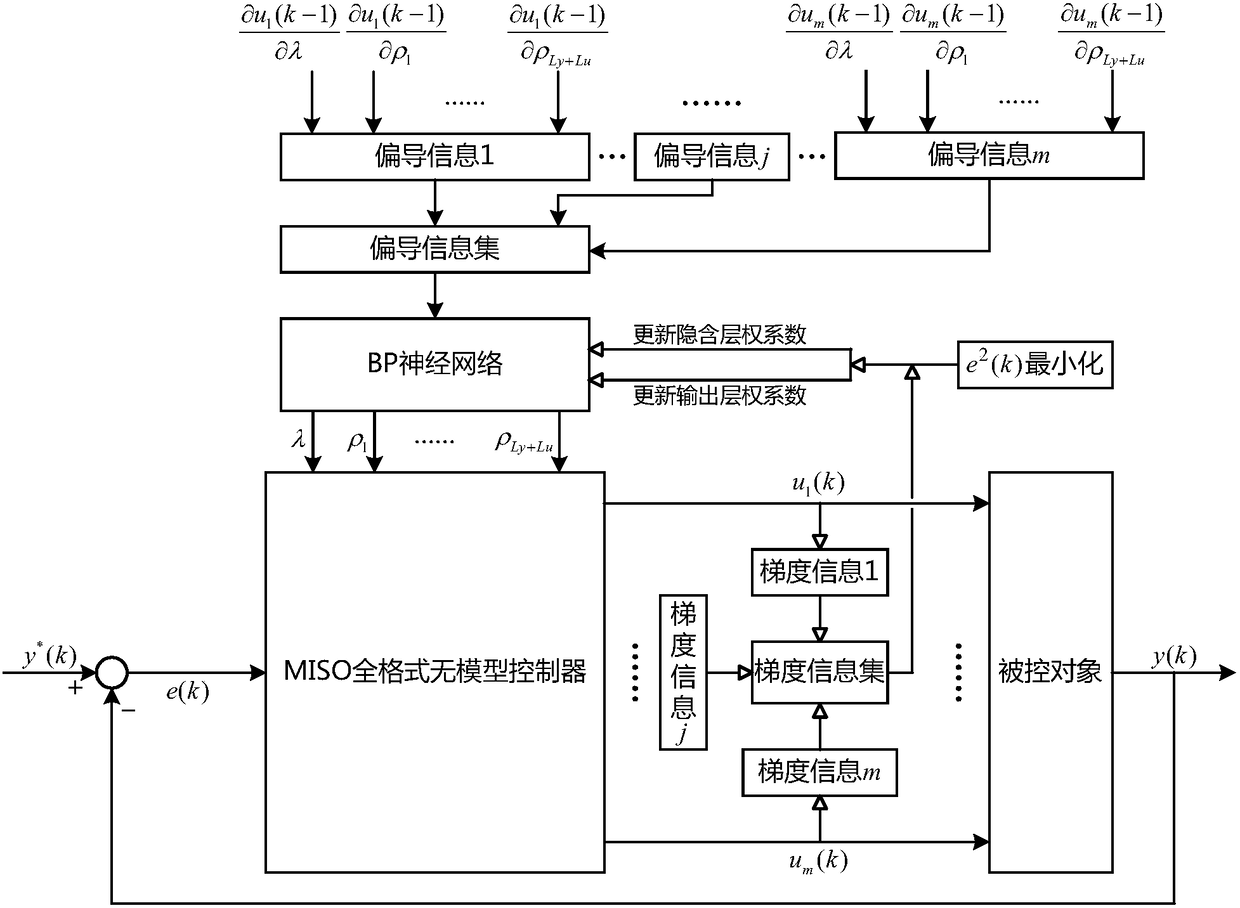
[0049] figure 1 The principle block diagram of the present invention is given. For a MISO system with m inputs (m is an integer greater than or equal to 2) and 1 output, the MISO full-format model-free controller is used for control; the control output linearization length constant Ly of the MISO full-format model-free controller is determined , Ly is an integer greater than or equal to 1; determine the control input linearization length constant Lu of the MISO full-format model-free controller, Lu is an integer greater than or equal to 1; the parameters of the MISO full-format model-free controller include penalty factor λ and step Long factor ρ 1 ,…,ρ Ly+Lu ; Determine the MISO full-format model-free controller to be tuned parameters, which are part or all of the MISO full-format model-free controller parameters, including penalty factor λ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More