

Stereo vision positioning method based on centroid characteristic points and neighborhood gray cross correlation
A technology of neighborhood grayscale and cross-correlation, applied in image data processing, instrumentation, calculation, etc., can solve the problem of multiple candidate points or the absence of matching points.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention will be described in more detail and complete below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, but not to limit the present invention.
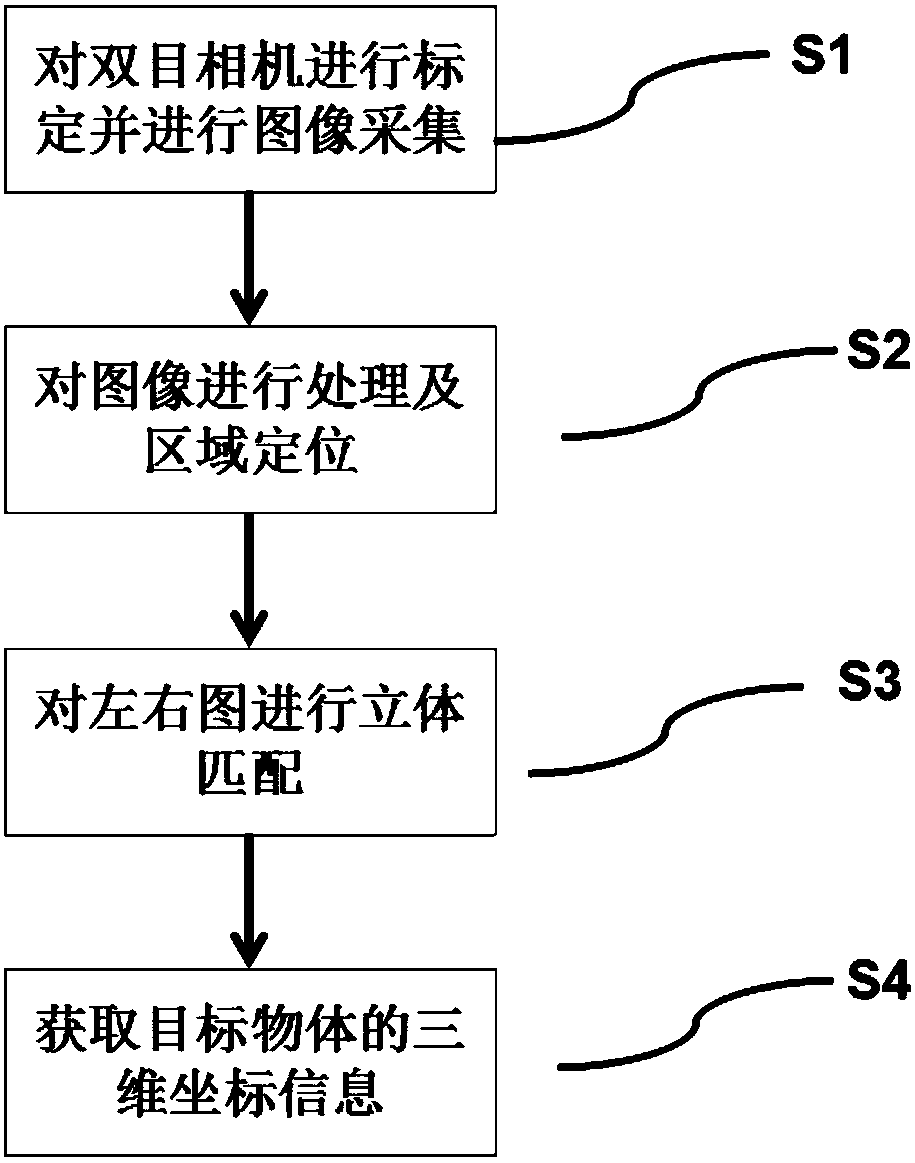
[0016] refer to figure 2 , a stereoscopic vision positioning method based on the cross-correlation between centroid feature points and neighborhood gray levels according to an embodiment of the present invention, the specific process includes:
[0017] S1, calibrate the binocular camera and perform image acquisition;
[0018] In order to achieve precise positioning of the target object, the camera needs to be calibrated first. This embodiment adopts the Zhang Zhengyou checkerboard calibration method. During calibration, the camera model adopts the pinhole model, which is defined as follows:
[0019] sm=A[R t]M (1)
[0020] which is
[0021]
[0022] In the formu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More