

A shape-adaptive climbing robot
A self-adaptive, robotic technology, applied in the field of crawling robots, can solve the problems of complex structure, limited climbing robots, poor adaptability, etc., and achieve the effects of light and compact structure, fewer drives, and low maintenance costs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be described in further detail below in conjunction with the accompanying drawings.
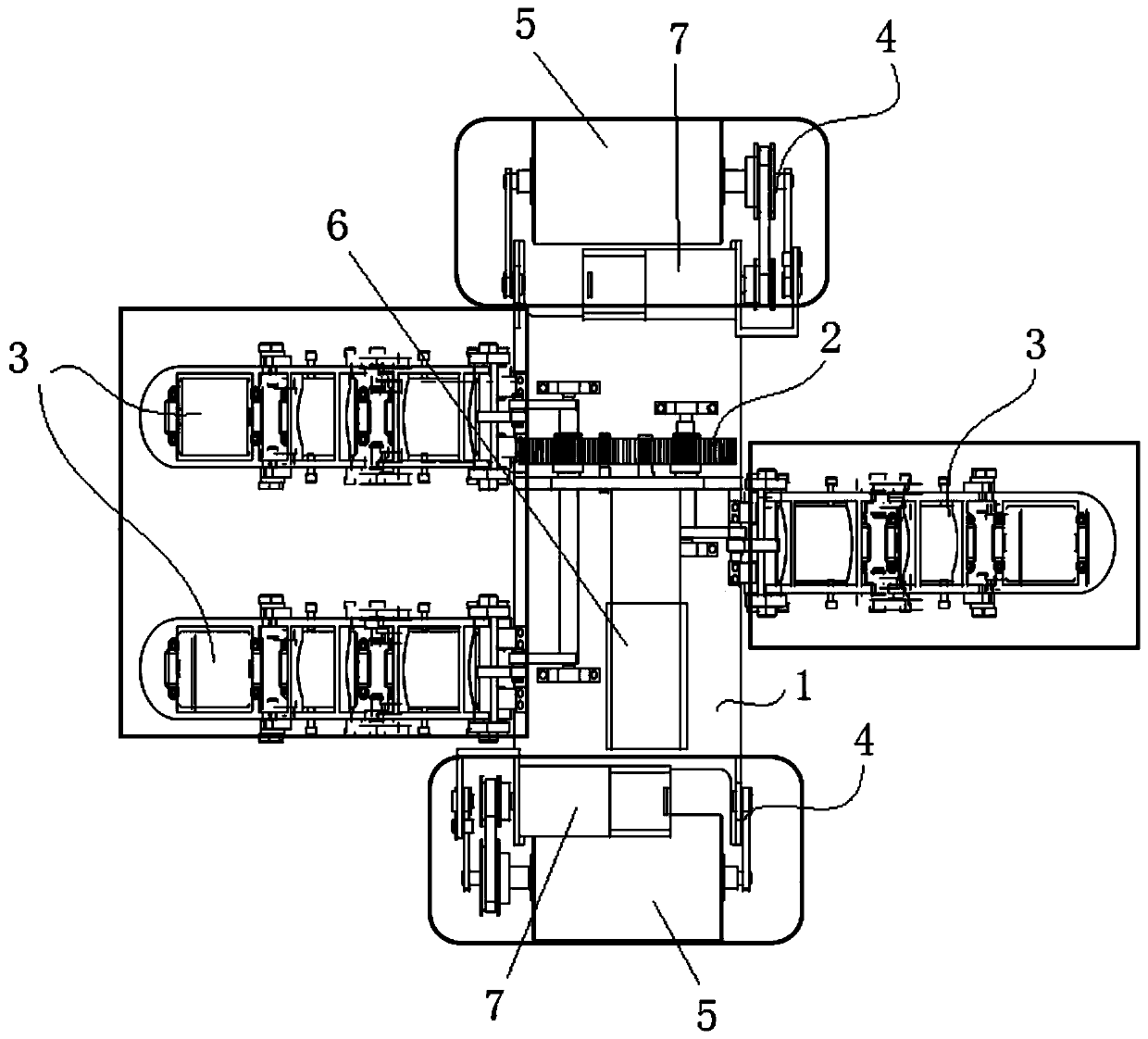
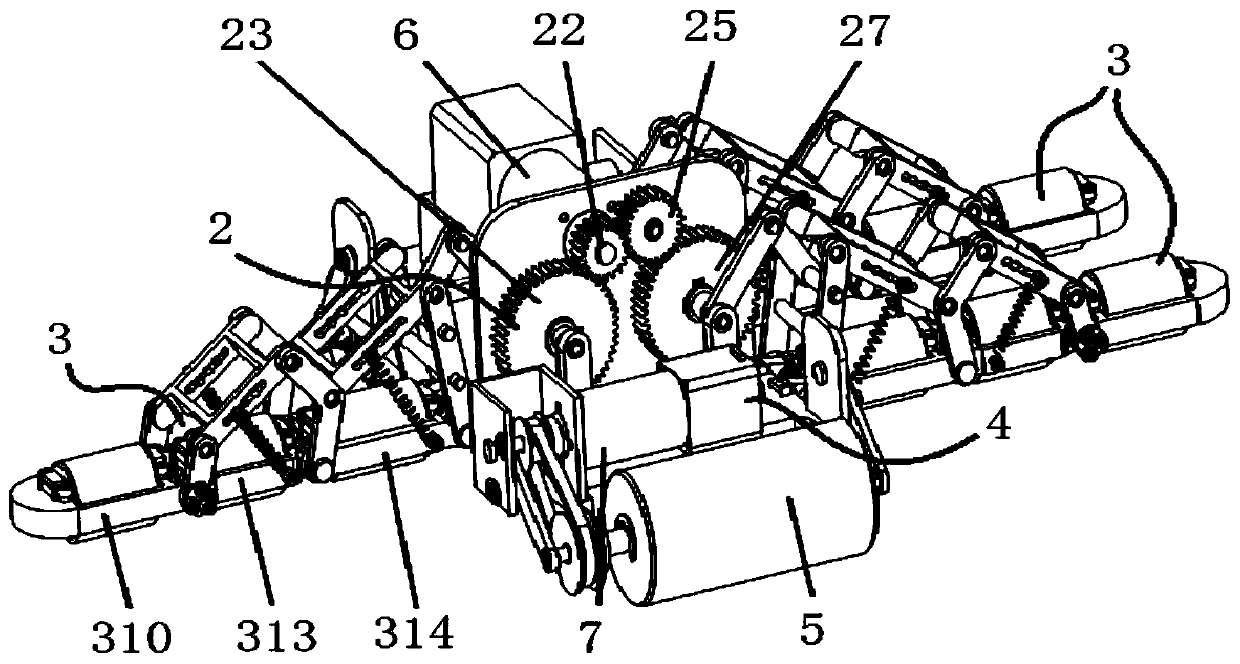
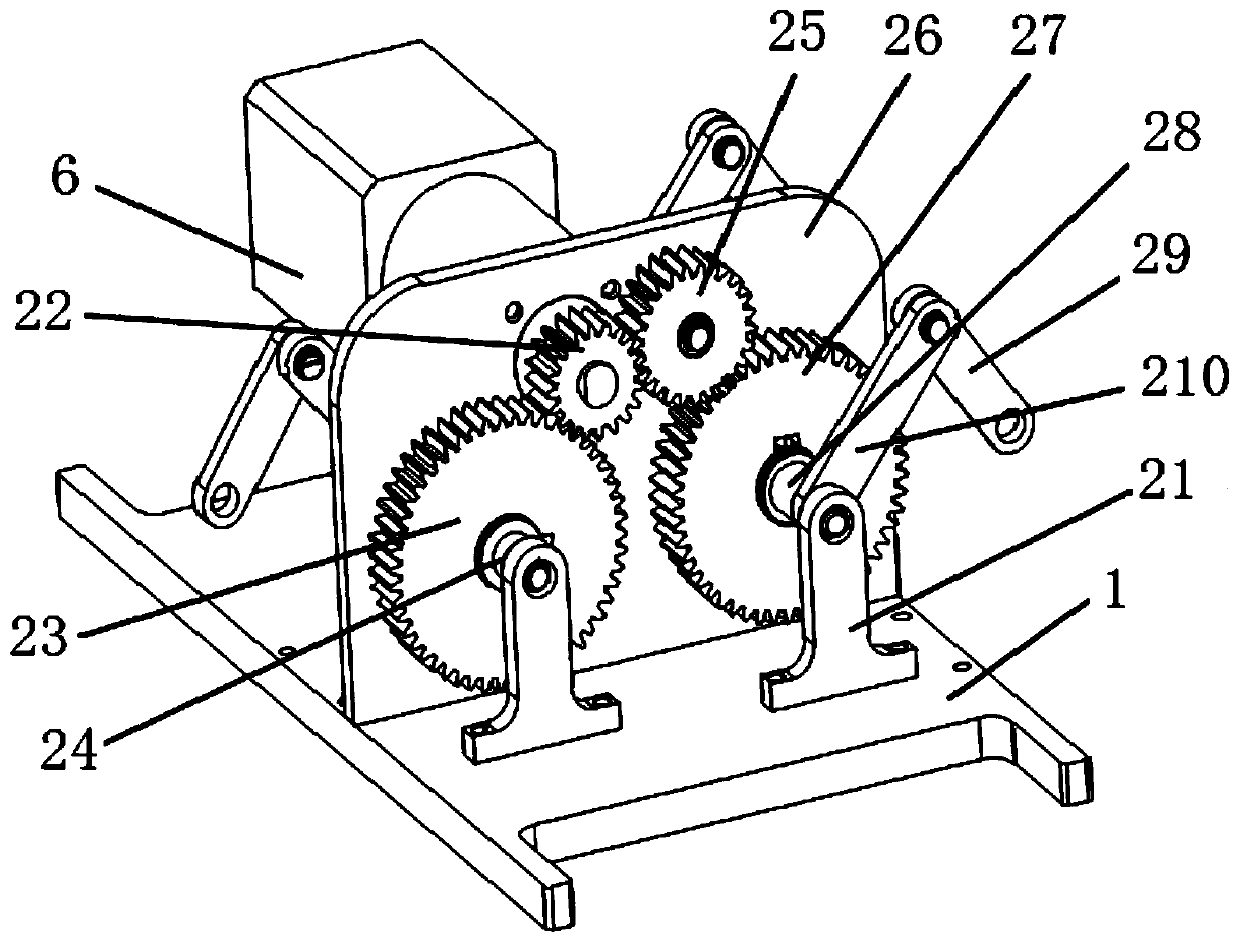
[0030] Such as Figure 1~2 As shown, the present invention includes a base 1, a holding motor 6, a holding transmission mechanism 2, a holding mechanism 3, a crawling motor 7, a crawling transmission mechanism 4 and a crawling wheel 5, wherein the front and rear ends of the base 1 are all provided with There are crawling wheel 5, crawling transmission mechanism 4 and crawling motor 7, the crawling wheel 5 is driven to rotate by the crawling motor 7, and the crawling motor 7 transmits torque through the crawling transmission mechanism 4, and on the base 1 It is provided with a holding motor 6 and a holding transmission mechanism 2. The holding transmission mechanism 2 includes a gear transmission group and a plurality of output connecting rods. The output connecting rods on both sides of the base 1 are driven to rotate synchronously and reversely through the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More