A multi-claw pneumatic non-destructive fruit and vegetable picking manipulator with human-like picking action
A manipulator and pneumatic technology, which is used in picking machines, manipulators, agricultural machinery and implements, etc., can solve the problems of uncontrollable gripping force of manipulators, increased difficulty in separating fruit from fruit stems, and difficulty in finding fruit stems. The effect of generality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
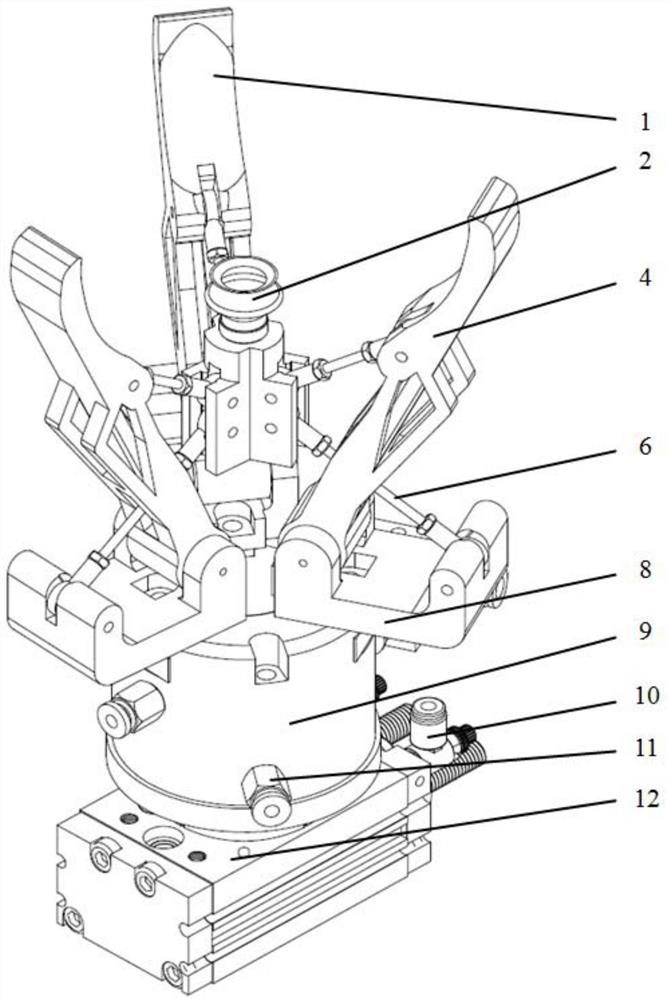
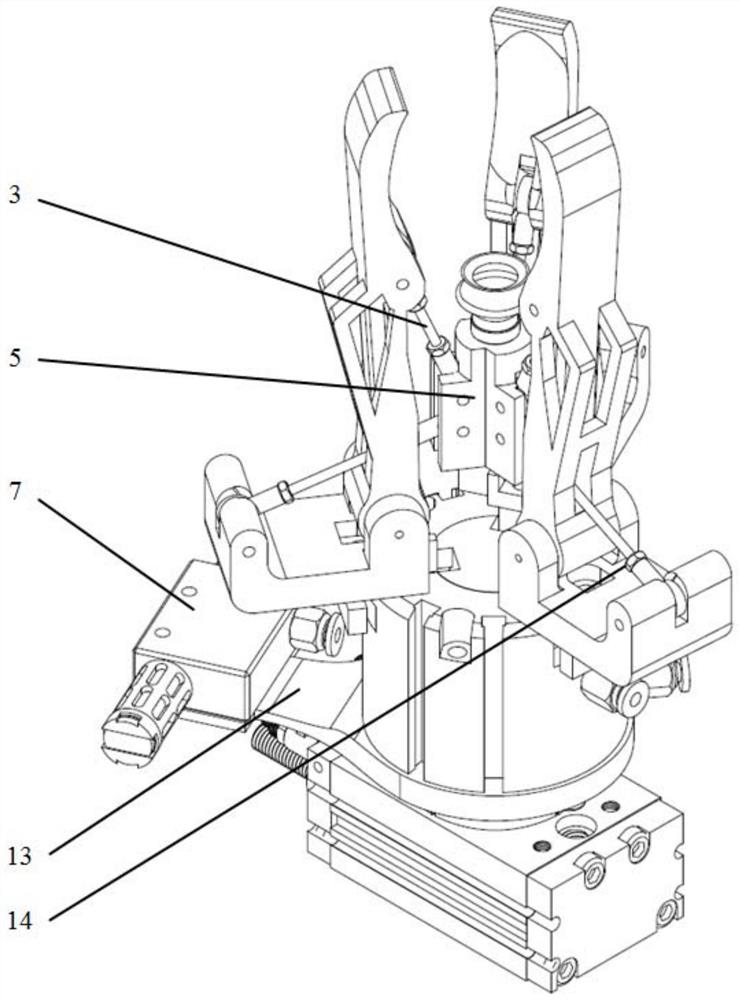
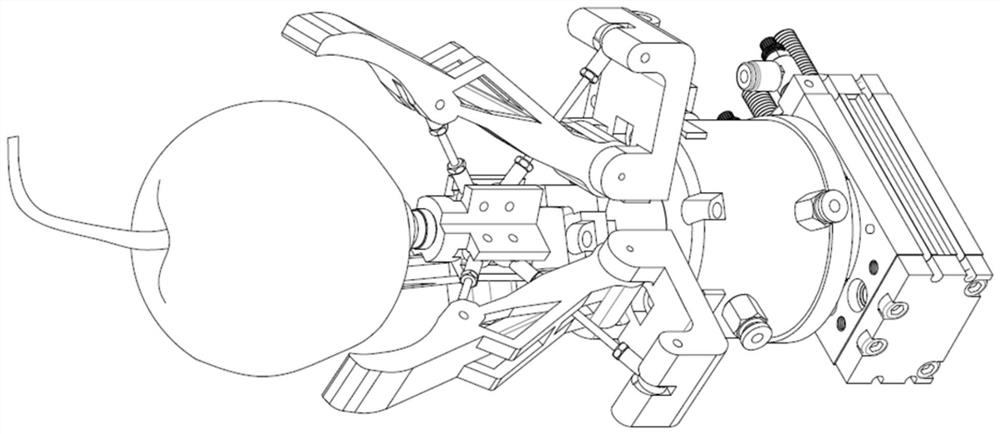
[0028] Such as figure 1 , 2 , 3, a multi-claw pneumatic non-destructive fruit and vegetable picking manipulator imitating human picking action, including a multi-claw picking manipulator mechanism and a non-destructive picking pneumatic system. The multi-claw picking manipulator mechanism includes a clamping mechanism and a picking mechanism. The clamping mechanism mainly realizes actions such as adsorption of round fruits and vegetables, straightening of fruit stems, and fruit clamping. Through the clamping mechanism, the posture adjustment and non-destructive clamping functions of fruit stems can be realized to prepare for subsequent picking. The picking mechanism can simulate the human picking action to separate the fruit from the stem.
[0029] The clamping mechanism includes a three-jaw cylinder 9, a movable base 8, a vacuum g...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap