

Soft finger, gripping device and gripping control system
A grasping device and software technology, used in manipulators, manufacturing tools, transportation and packaging, etc., can solve the problems of unable to grasp egg objects, crushed grasped objects, and fingers without pressure sensing function.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
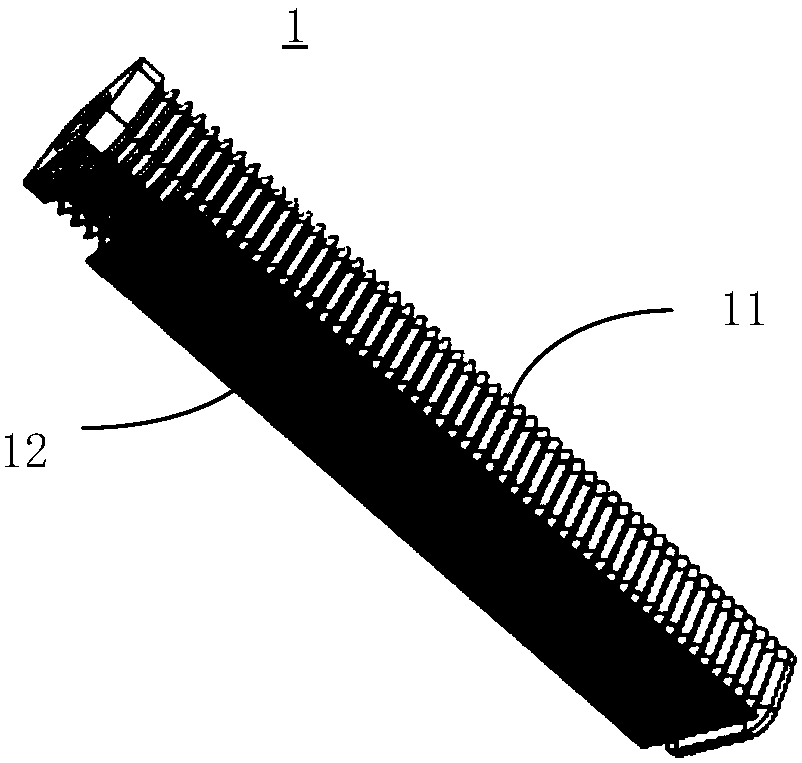
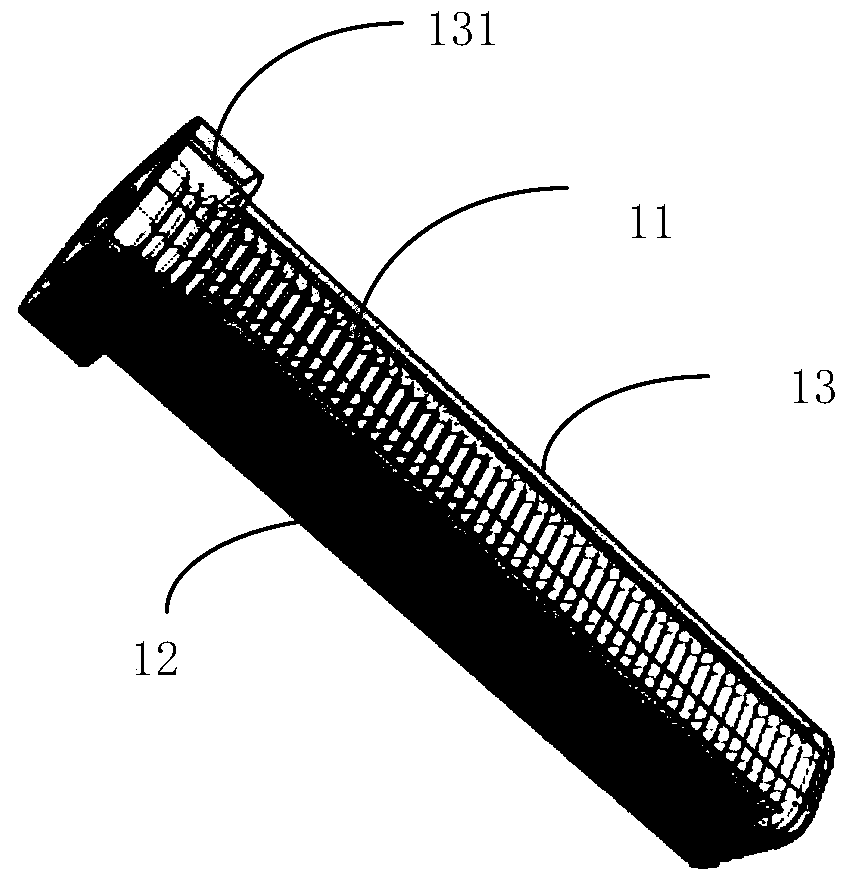
[0037] Such as Figure 1-Figure 3 As shown, the embodiment of the present invention provides
[0038] The present invention provides a soft finger, comprising: a finger body 1, the finger body 1 is a soft material with a first expansion coefficient; a constraining layer 12, the constraining layer 12 is a soft material or an elastic material, and is arranged on On the finger body 1 side, the constraint layer 12 has a second expansion coefficient; the first expansion coefficient is greater than the second expansion coefficient.
[0039] Specifically, in a preferred embodiment, the cross-sectional structure of the soft finger includes rectangle, trapezoid, semicircle and variable cross section, etc., wherein, the rectangle, trapezoid and semicircle can all realize constant curvature bending, while the variable cross section realizes variable Curvature bending, air pressure and resulting driving force required for soft finger deformation are related to the cross-sectional shape. ...
Embodiment 2
[0048] Such as Figure 6 As shown, the present invention provides a soft finger, comprising: a finger body 1, the finger body 1 is a soft material, and the material has a first expansion coefficient; a constraining layer 12, and the constraining layer 12 is a soft material or an elastic material , arranged on the side of the finger body 1, the constraining layer 12 has a second expansion coefficient; the first expansion coefficient is greater than the second expansion coefficient. The soft finger can also include a joint 3 connected between two adjacent finger bodies 1 .
[0049] In order to imitate human fingers, this embodiment preferably adopts joints, that is, joints 3 are also included on the basis of the above-mentioned soft fingers. The above-mentioned joint is in a contracted state on the first side, and in a tensionable state on the second side, and when the second side is in a contracted state, a straight line is formed between the finger body and the finger body; ...
Embodiment 3
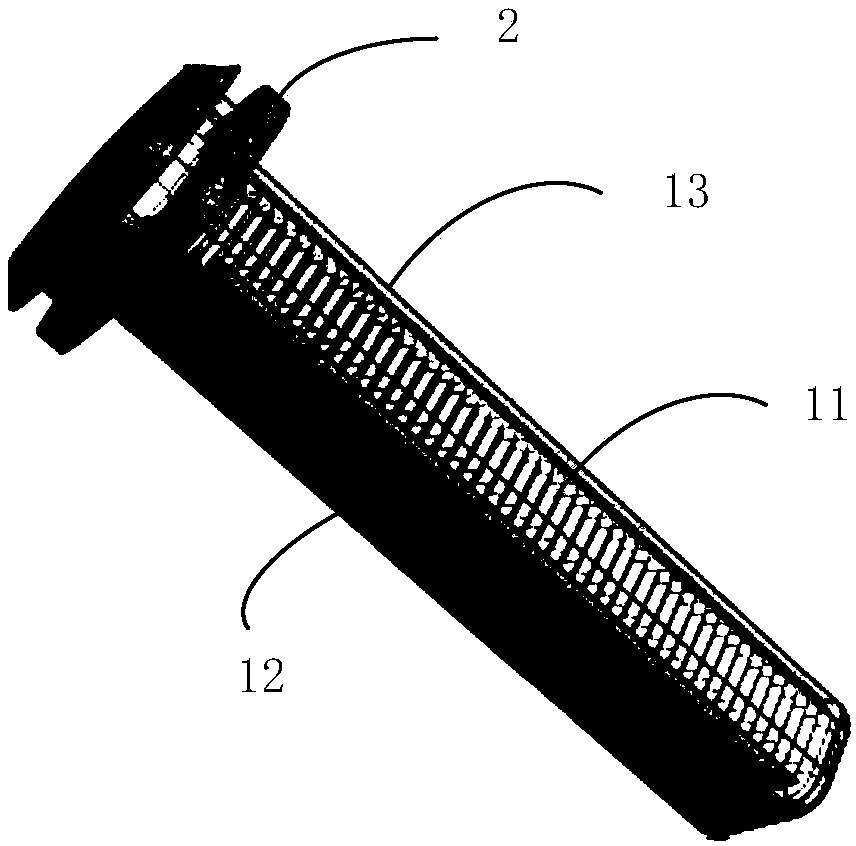
[0068] Such as Figure 4-5 As shown, the embodiment of the present invention provides a grasping device, including at least two soft fingers as described in Embodiment 1. The grasping device also includes a base plate 4 , and the soft finger is fixedly connected to one side of the base plate 4 through the finger-body connecting plate 2 . Generally, there can be 2-4 soft fingers, and in this embodiment, there are 4 fingers.
[0069] Specifically, the base 4 may be fixedly connected via the finger-to-body connecting plate 2 . The finger connecting plate 2 is clamped by the protruding portion 131 . The finger-body connecting plate 2 is usually two acrylic plates, and the current method used is to use two acrylic plates to clamp the upper end of the soft finger with a certain pressure. Clamping pressure is achieved via screws. Screws can be used to connect with the basic 4 parts at the same time. Ordinary water pipe joints can be installed on the acrylic board, and pass throu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More