

Obstacle recognition method and device, terminal and computer readable storage medium
A technology of obstacle identification and computer program, applied in the fields of obstacle identification methods and devices, terminals and computer-readable storage media, can solve the problems of high price, failure to maintain real-time obstacle identification, obstacle errors, etc., and achieve maintenance The effect of timeliness and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] In order to make the purpose, features and advantages of the present invention more obvious and understandable, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described The embodiments are only some of the embodiments of the present invention, but not all of them. Based on the embodiments of the present invention, all other embodiments obtained by those skilled in the art without making creative efforts belong to the protection scope of the present invention.
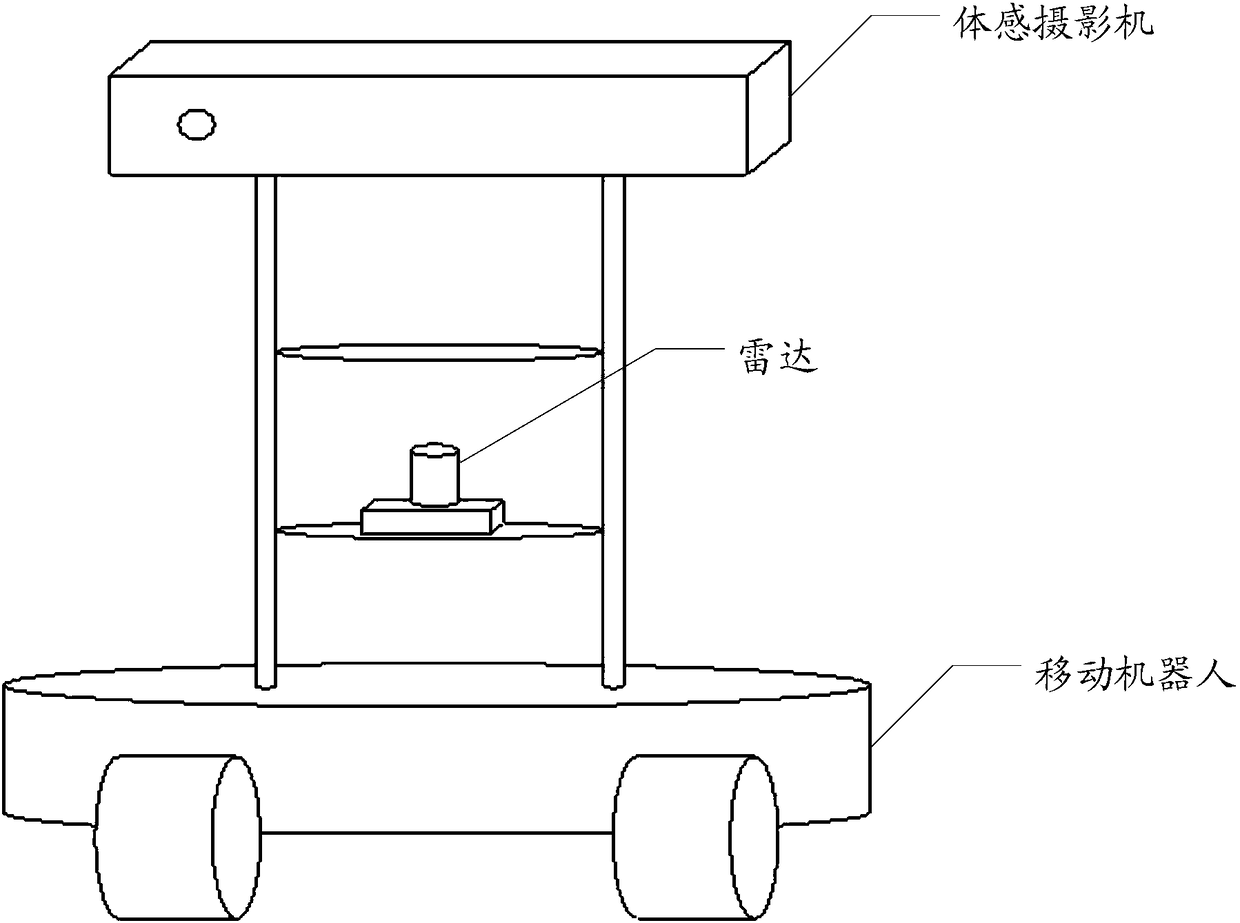
[0018] see figure 1 , figure 1 The application environment diagram of the obstacle recognition method provided by the embodiment of the present invention. Such as figure 1 As shown, the mobile robot is equipped with a radar and a somatosensory camera. Through the obstacle recognition method described below, the obstacle recognition of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More