

External parameter calibration method for 3D camera group
A calibration method and camera technology, applied in image data processing, instrumentation, calculation, etc., can solve the problems of poor robustness, inconvenient operation, low precision, etc., and achieve the effect of good real-time performance, simple operation and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0042] Below in conjunction with accompanying drawing and embodiment the present invention will be further described:
[0043] The hardware devices required in this embodiment include: a calibration board for calibrating the camera group, a camera group, and a display for receiving and displaying the planar checkerboard image.
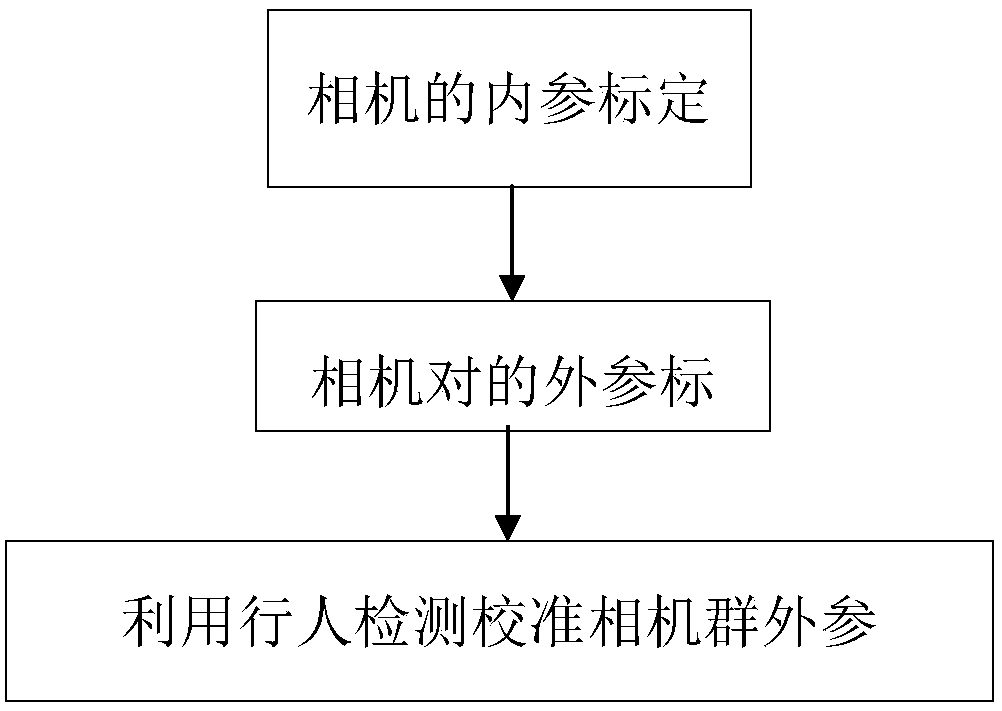
[0044] A method for calibrating external parameters of a 3D camera group, comprising the steps of:
[0045] S1. Calibration of camera internal parameters:
[0046] S1.1 Connect the camera to the power supply and connect it to the computer through the USB interface, print the checkerboard, and paste the checkerboard on the plate to ensure that the surface of the checkerboard is flat enough, so that a simple calibration board is ready;
[0047] S1.2 Put the calibration board in the camera field of view, control to turn on the camera, and start shooting checkerboard images for camera calibration;
[0048] S1.3 Move the camera in many different direction...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More