

Camera array calibration method based on matrix decomposition
A technology of matrix decomposition and calibration method, applied in the field of camera array calibration, can solve the problems of scattered distribution of cameras, aberration of camera field of view, huge camera array, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0105] Below in conjunction with embodiment further illustrate the present invention.
[0106] A camera array calibration method based on matrix decomposition, comprising the following steps:
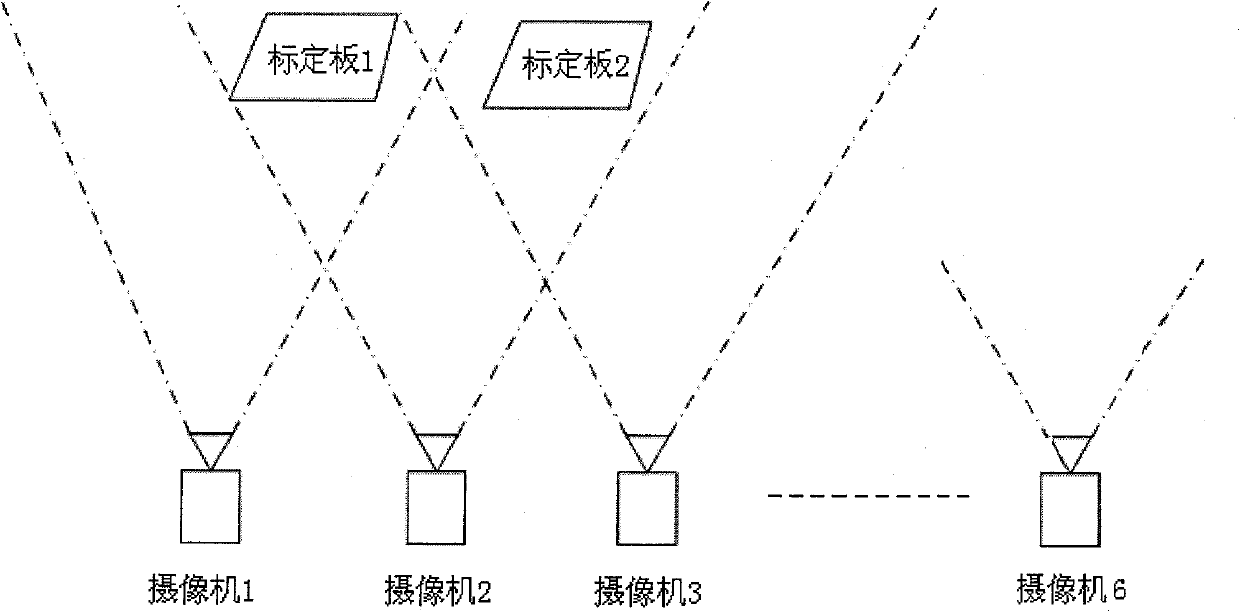
[0107] 1. Suppose there are six cameras taking photos of the calibration board at 24 different positions (such as figure 1 shown), and at the same time, the obtained images are also taken in accordance with the sequence of photographing and the corresponding camera number;
[0108] In the following representations, we will use the subscript i to indicate the camera number, and the superscript j to indicate the number of the calibration plate image. At the same time, each camera captures at least 4 images of the calibration plate.
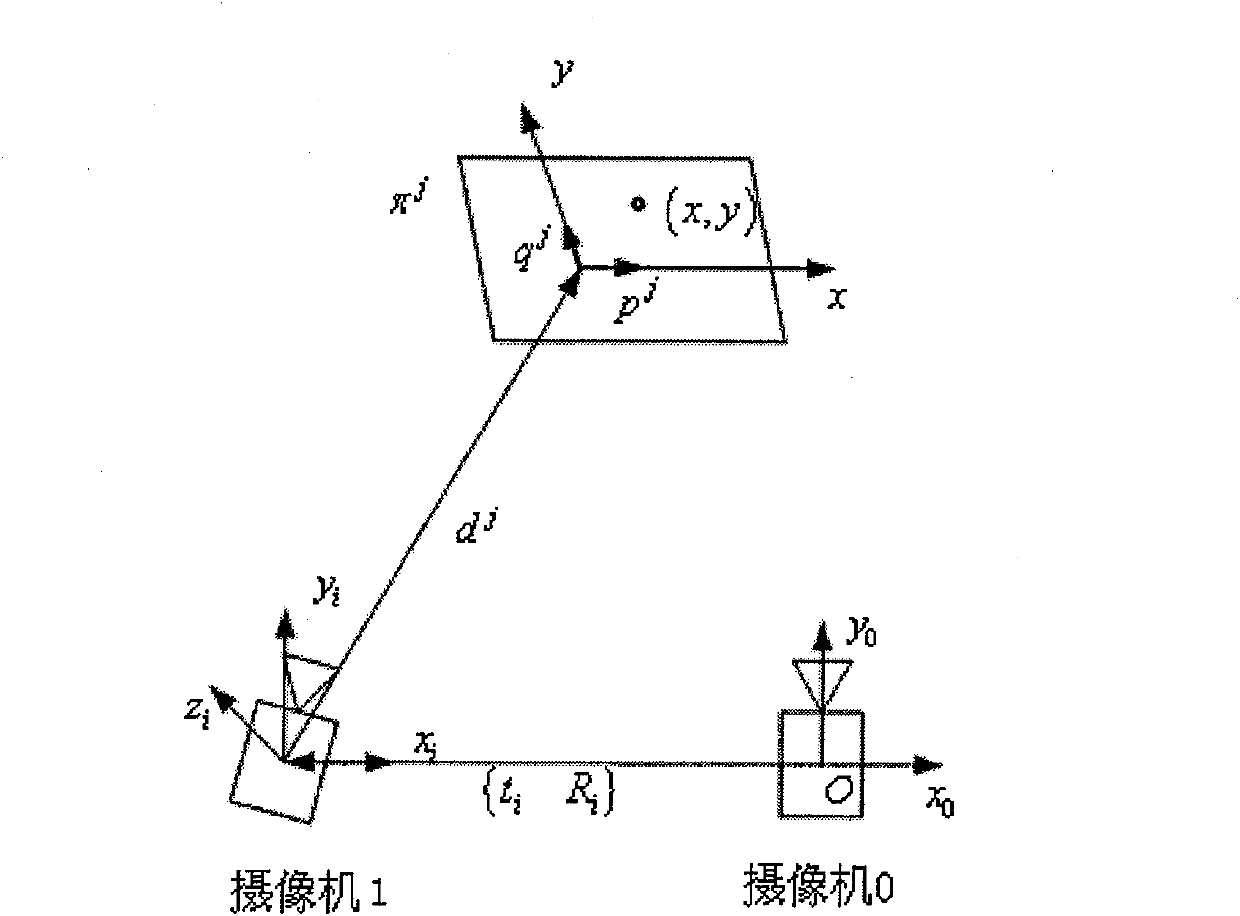
[0109] 2. Use the actual physical coordinate data of the feature points on the calibration board and the image data obtained by taking pictures to obtain the homography matrix of the camera
[0110] a) The imaging model of the camera is as formula (1)
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More