

Multi-scene drone locating mapping method based on three-dimensional laser radar
A three-dimensional laser and unmanned aerial vehicle technology, which is applied in the re-radiation of electromagnetic waves, radio wave measurement systems, and the use of re-radiation. Improve efficiency and solve the effect of indoor and outdoor positioning fusion problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The following description and drawings illustrate specific embodiments of the invention sufficiently to enable those skilled in the art to practice them.
[0020] Other embodiments may incorporate structural, logical, electrical, procedural, and other changes, the examples merely represent possible variations, individual components and functions are optional unless explicitly required, and the order of operations may vary As such, parts and features of some embodiments may be included in or substituted for those of other embodiments.
[0021] The scope of embodiments of the present invention includes the full scope of the claims, and all available equivalents of the claims.
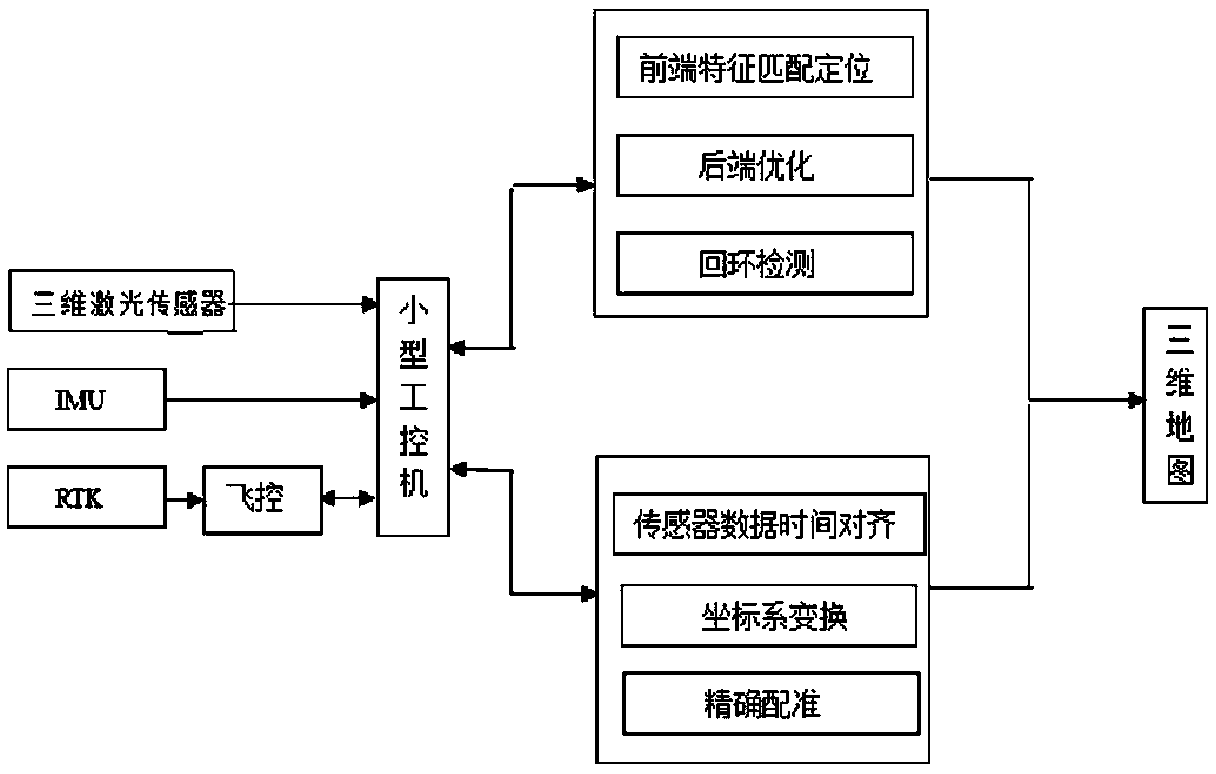
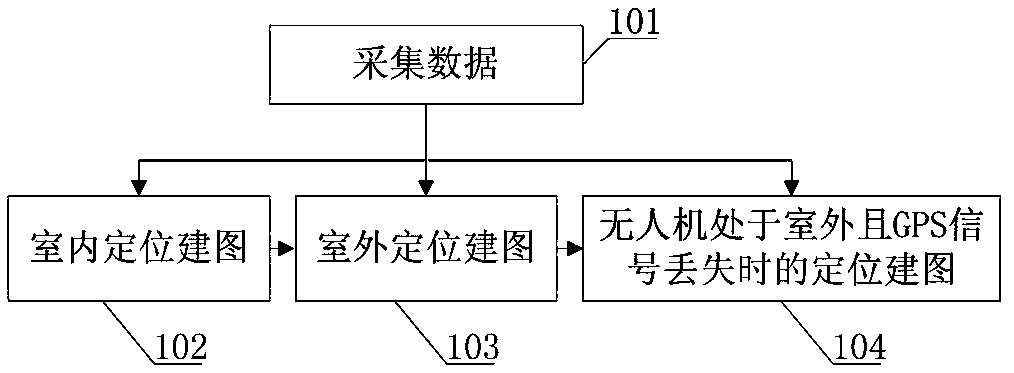
[0022] like figure 1 and 2 As shown, in some illustrative embodiments, a three-dimensional lidar-based multi-scene positioning and mapping method for drones is provided.
[0023] The 3D map describes the geometric structure of the environment through the point cloud data of the laser, realizes t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More