

A control method and control system for a multi-degree-of-freedom displacement change compensation platform
A technology of displacement change and control method, applied to controllers with specific characteristics, electric controllers, etc., can solve problems such as compensation hysteresis, inaccurate compensation of actuators, and inability to predict the movement trend of the lower platform in advance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and through specific implementation methods.
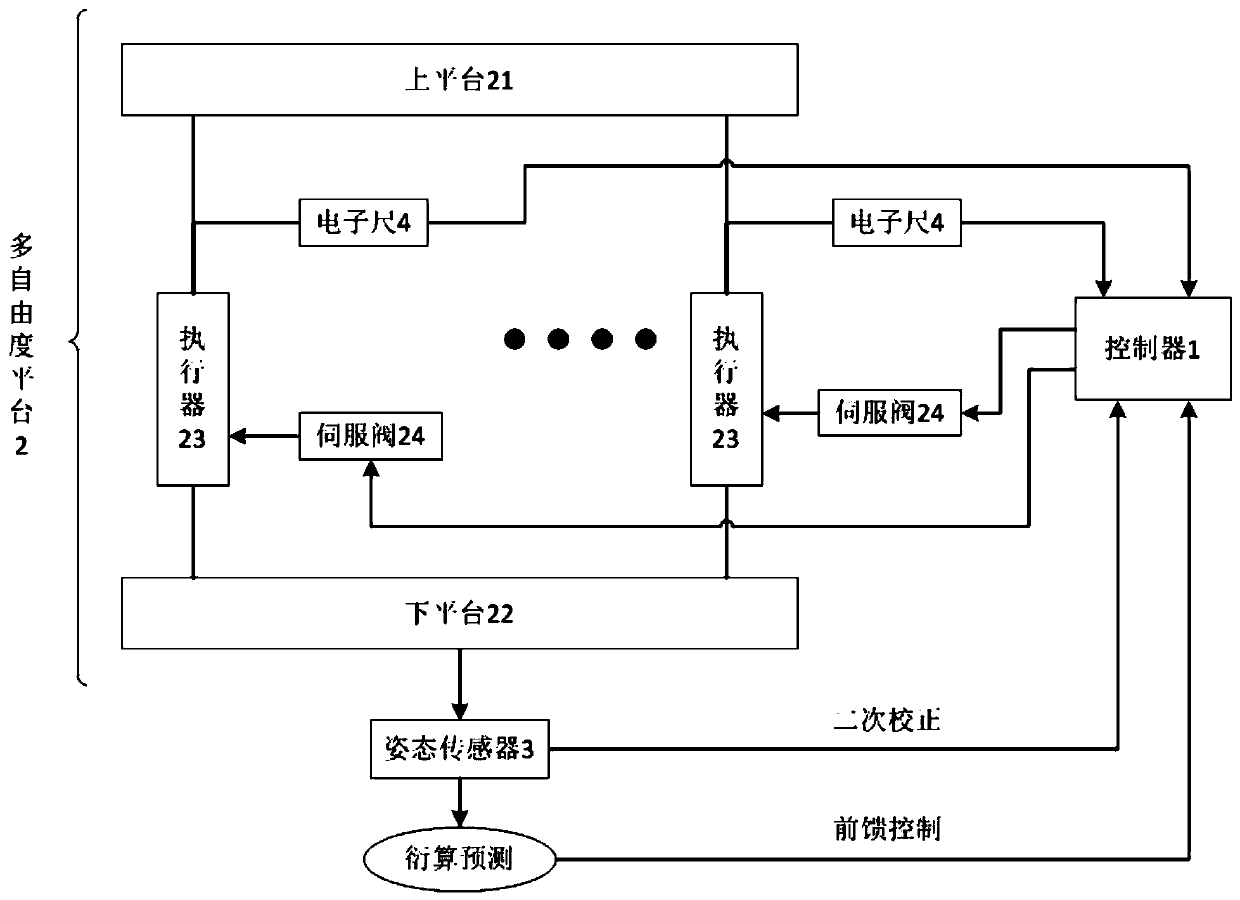
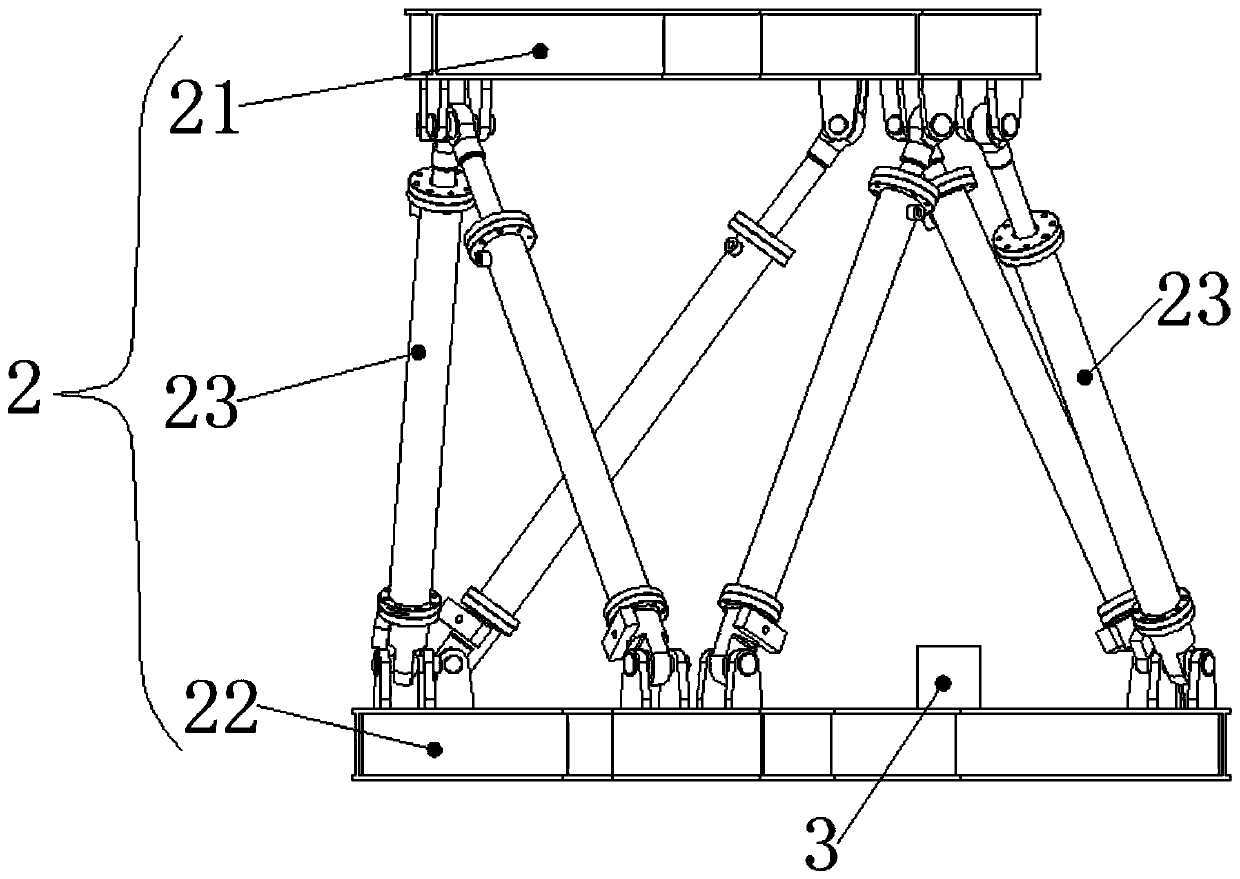
[0045] The control method of the multi-degree-of-freedom displacement compensation platform of this embodiment, such as figure 1 As shown, including controller 1 and multi-degree-of-freedom platform 2, such as figure 2 As shown, the multi-degree-of-freedom platform 2 includes an upper platform 21, a lower platform 22, and six actuators 23 hinged between the upper platform 21 and the lower platform 22, and the controller 1 drives the actuators 23 through a servo valve 24. The piston rod telescopic of device 23 comprises the following steps:
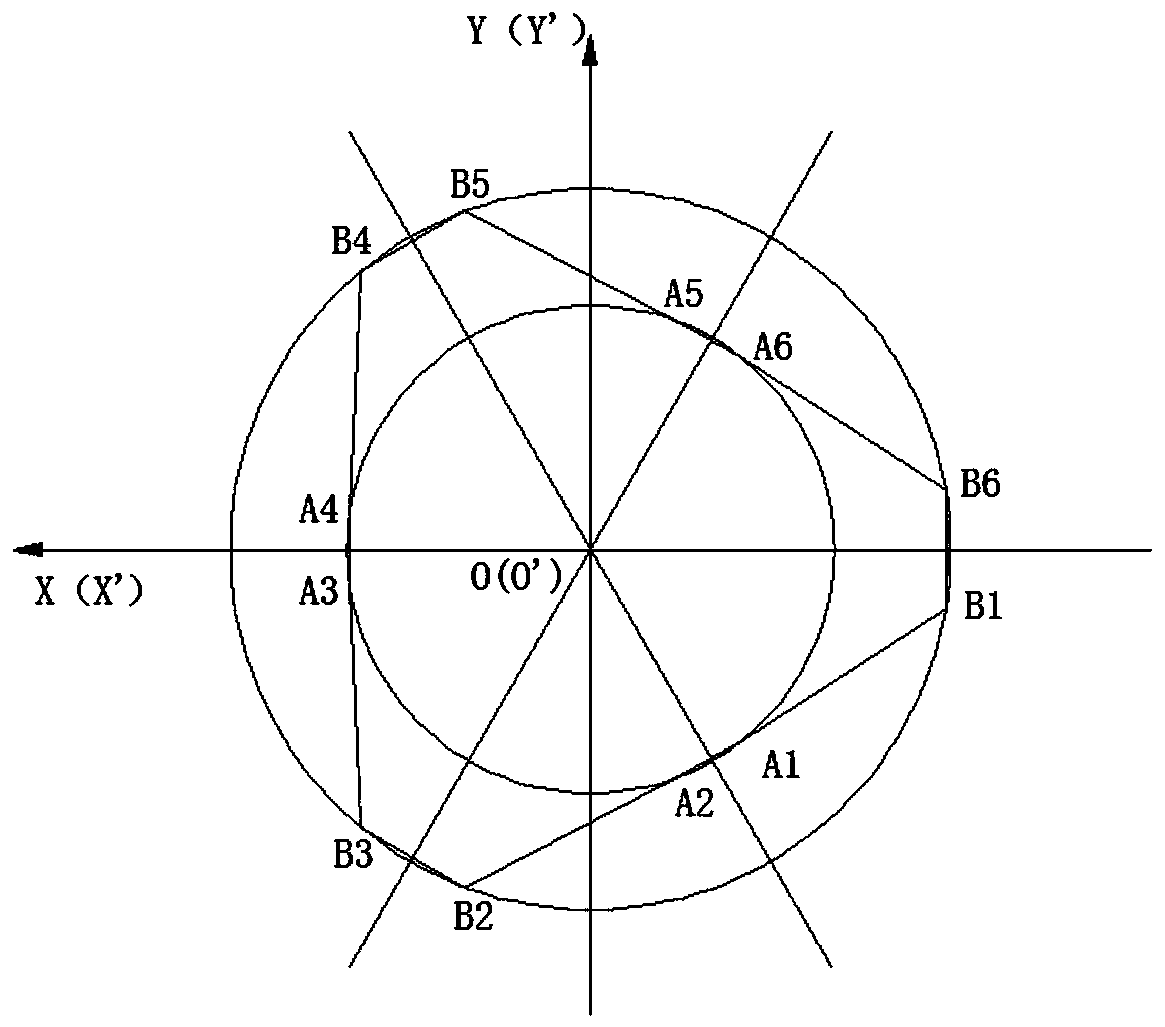
[0046] Step A, such as image 3 As shown, the static coordinate system OXYZ is established on the upper platform 21, the center of the circumscribed circle of the upper platform 21 is selected as the origin of the static coordinate system, and the dynamic coo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More