

Modular robot control method and system
A control method and a control system technology, applied in the field of modular robot control methods and systems, can solve the problems of inability to verify the combined structure, poor user experience, etc., and achieve the effect of improving the convenience of use and increasing the design space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
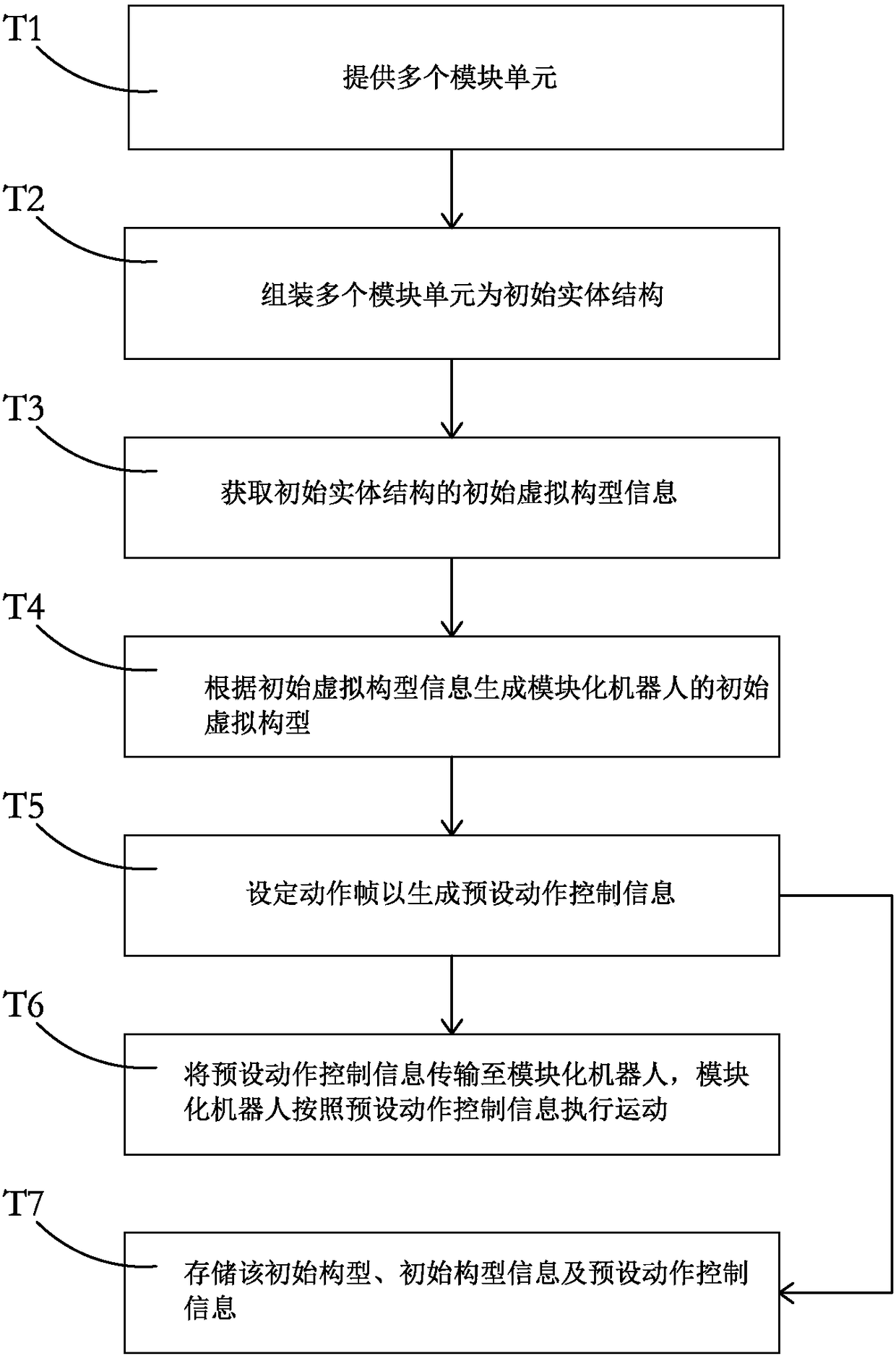
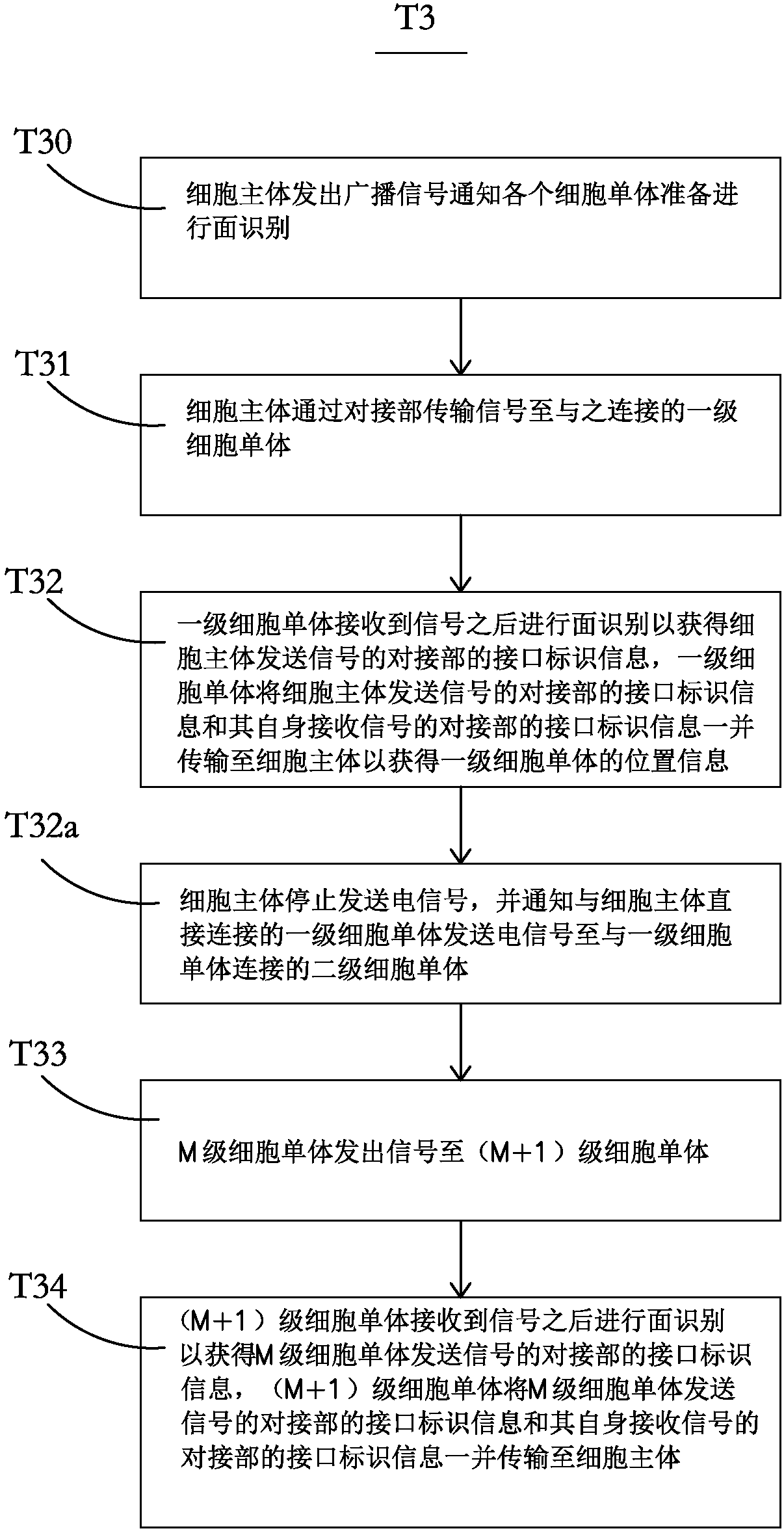
[0061] Please refer to figure 1 , the first embodiment of the present invention also provides a modular robot control method, the modular robot includes at least two module units, each module unit includes two relatively movable sub-modules, such as two sub-modules can be relatively Rotation, preferably each module unit is composed of two upper and lower hemispheres that can perform relative rotational movement, each sub-module includes at least one pair of docking parts, each docking part is provided with an interface, each interface has unique interface identification information, and the module The unit and the module unit are connected through a docking part. It can be understood that when each sub-module includes at least two docking parts, the two module units are connected through a respective docking part, forming a virtual connection surface at the connection position of the two module units, and the two module units can be connected based on the virtual connection su...
no. 2 example
[0122] Please refer to Figure 8 , the second embodiment of the present invention also provides a modular robot control system 30, which is used to control the initial physical structure spliced by a plurality of modular units, the modular robot control system 30 includes:
[0123] A storage module 31, configured to store initial virtual configuration information of the initial physical structure;
[0124] A configuration generating module 33, configured to generate an initial virtual configuration of a modular robot according to initial virtual configuration information;
[0125] An action generating module 35, configured to generate preset action control information; and
[0126] The transmission module 37 is used to transmit the preset action control information to the modular robot to execute according to the preset action control information.
[0127] Wherein the storage module 31 is connected with the modular robot to store the initial virtual configuration informati...
no. 3 example
[0129] Please refer to Figure 9 , the third embodiment of the present invention also provides a modular robot control system, the modular robot control system includes:
[0130] A modular robot 41, which is assembled from a plurality of modular units and has an initial solid structure;
[0131] Memory 43, and one or more programs, wherein one or more of the programs are stored in the memory, the memory communicates with the module unit, and the program is used to perform the following steps:
[0132] Acquiring and storing initial virtual configuration information of the initial physical structure;
[0133] Generate the initial virtual configuration of the modular robot according to the initial virtual configuration information;
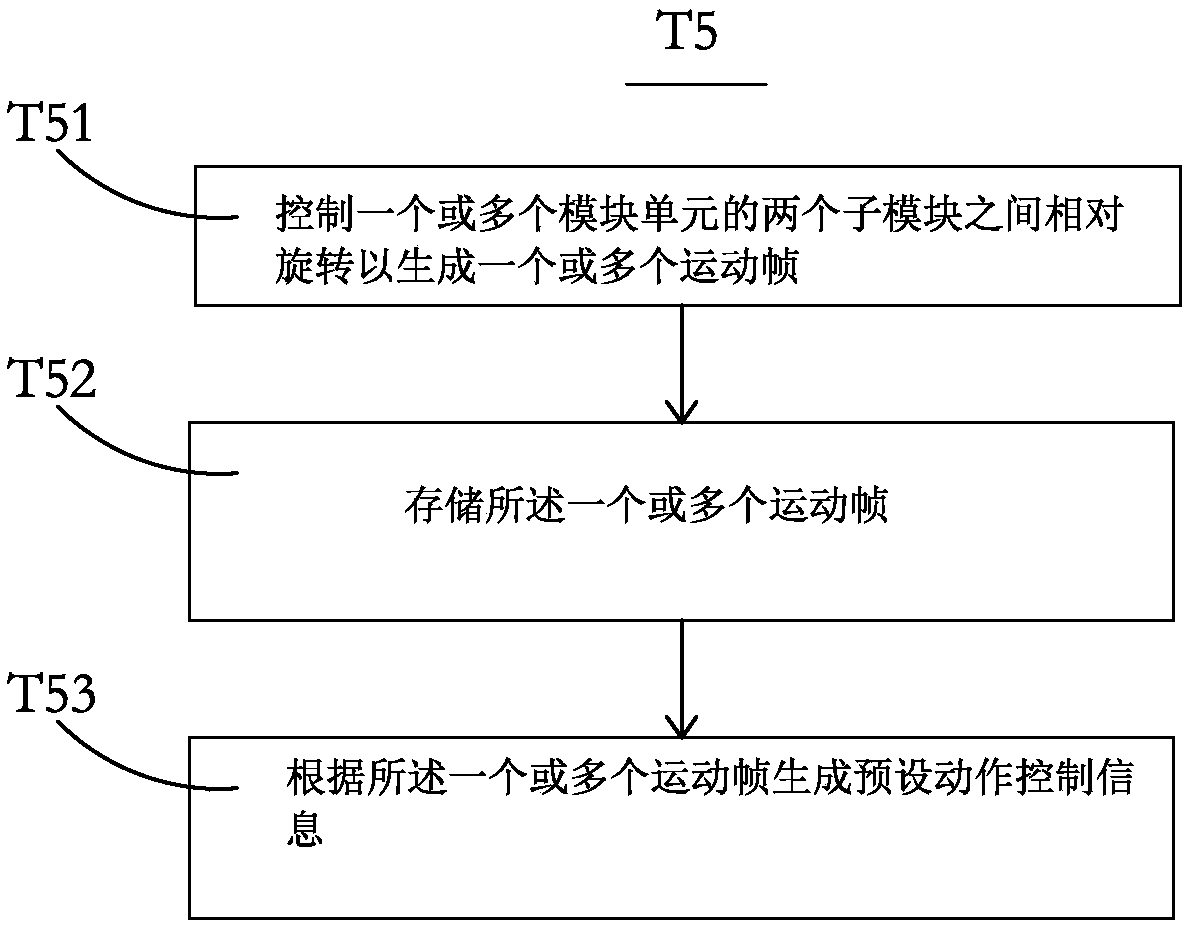
[0134] Set motion frames to generate preset motion control information; and
[0135] Transfer preset motion control information to the modular robot.
[0136] In addition, the plurality of modular units include a cell body and at least one cell b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More