

Flexible manipulator with bow-shaped continuous curved inner cavity
A bow-shaped, manipulator technology, applied in the field of flexible manipulators, to achieve the effect of simple and effective integration, high cost performance and good performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The implementation of the present invention will be described in detail below in conjunction with the drawings and examples.
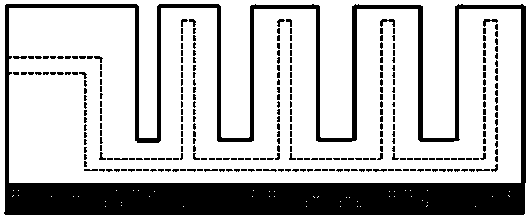
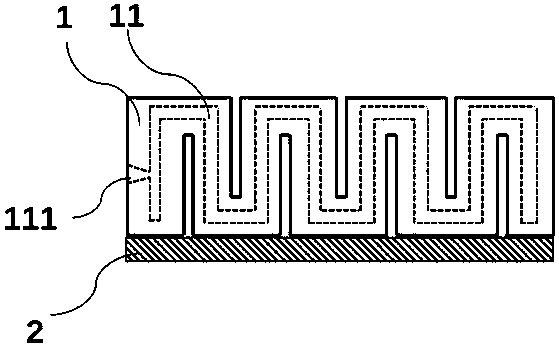
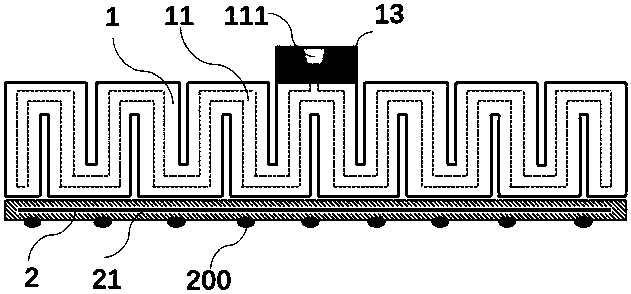
[0023] Such as figure 2 As shown, a flexible manipulator with a bow-shaped continuous curved inner cavity is characterized in that it includes a main body 1 and an appendage 2. The main body 1 and the appendage 2 are made of soft materials, and the elastic modulus of the material for making the appendage 2 is It is greater than the elastic modulus of the material of the main body 1, and can control the bending deformation posture and movement process of the entire manipulator through the elastic modulus of the material of the appendage 2; the overall shape of the main body 1 is bow-like, and a bow-like The font-shaped continuous closed air cavity 11 and the air vent 111 communicated with the external driving air source; the bottom surface of the appendage 2 and the main body 1 are fixed together; The cavity 11 is inflated or deflated, so as to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More