Mold and method for manufacturing flexible robot
A technology of robots and molds, applied in the manufacture of tools, manipulators, etc., can solve the problems of slow deformation of flexible fingers, inability to adapt to fast grasping, insufficient strength, etc., and achieve the effect of low cost, simple structure, and fast deformation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be further described below in conjunction with the examples, but it should not be understood that the scope of the subject of the present invention is limited to the following examples. Without departing from the above-mentioned technical ideas of the present invention, various replacements and changes made according to common technical knowledge and conventional means in this field shall be included in the protection scope of the present invention.
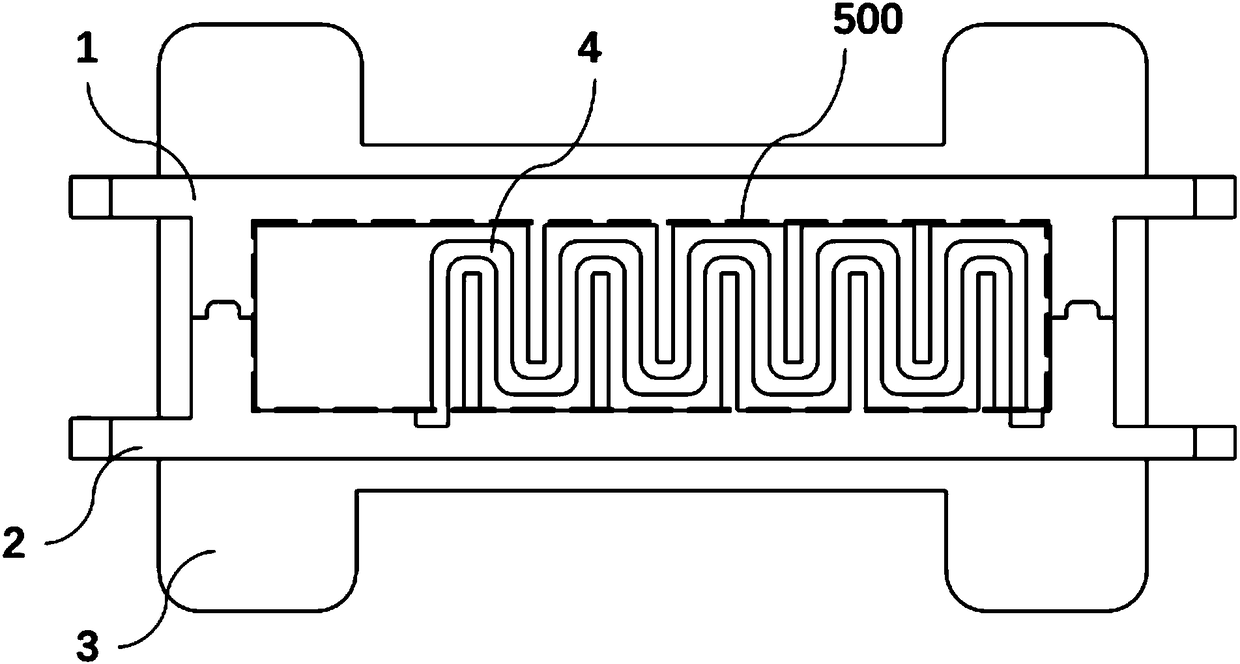
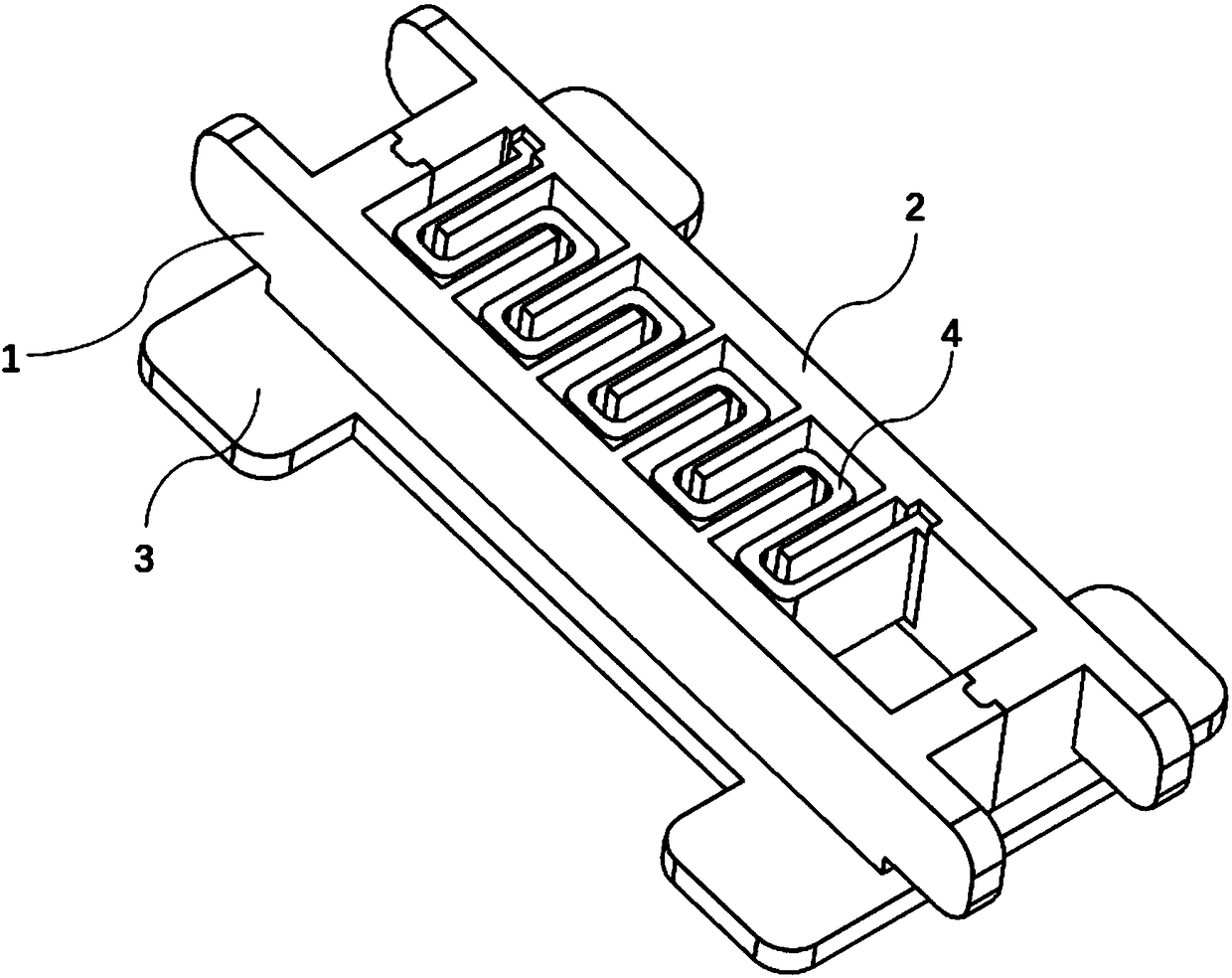
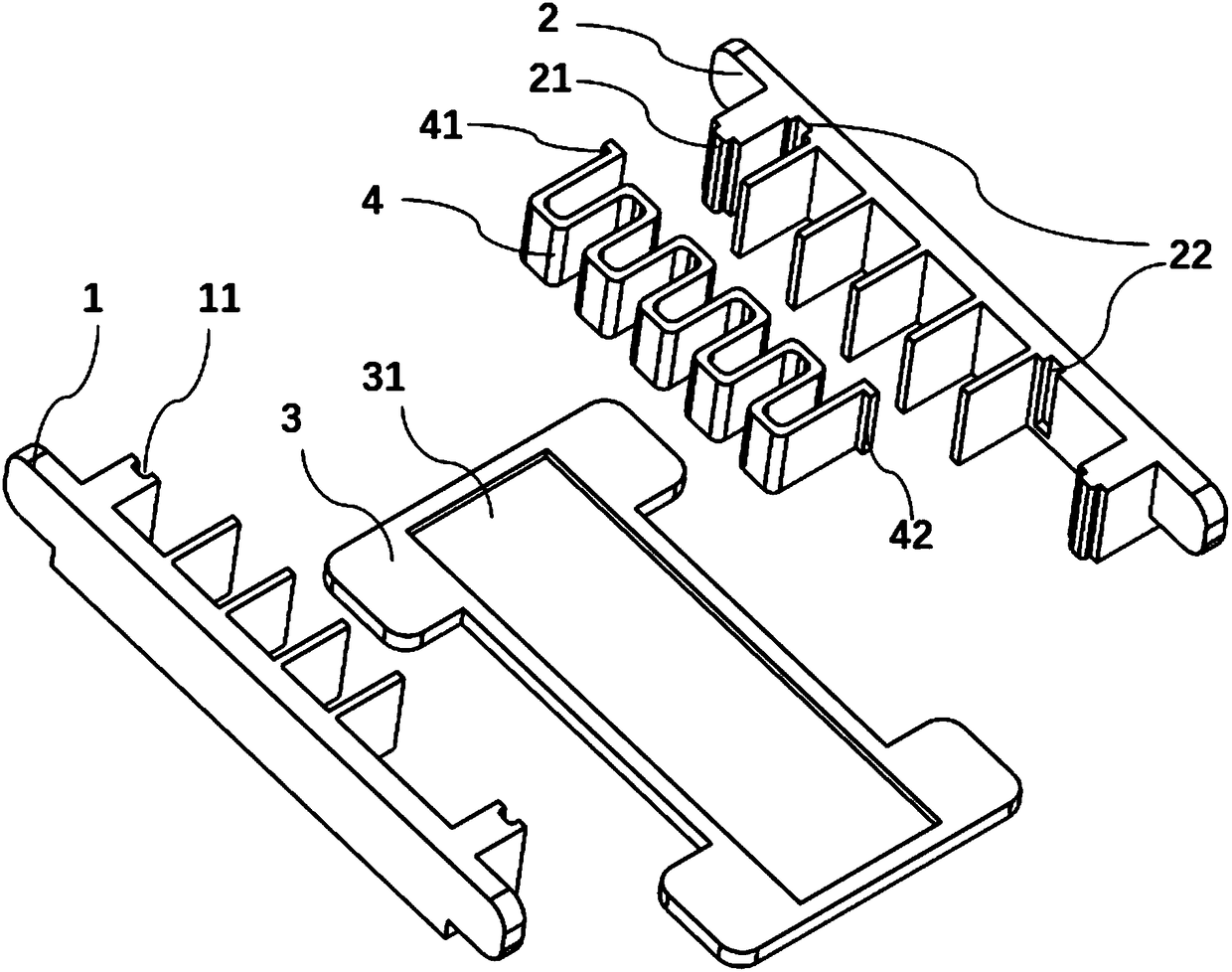
[0021] Such as figure 1 , 2 As shown in and 3 , this embodiment discloses a mold for manufacturing a soft robot, including an upper mold 1 , a lower mold 2 , a bottom mold 3 and a wave-shaped part 4 . The upper mold 1 and the lower mold 2 are of the same height, the upper mold 1 is provided with a positioning groove 11 , and the lower mold 2 is provided with a positioning protrusion 21 matching with the positioning groove 11 . The wave-shaped part 4 is provided with two left and right positioni...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More