

Elevator door sheet positioning and grabbing device and method based on vision
A grasping device, elevator technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of instability, poor positioning accuracy of a single camera, large size of elevator door panels, etc., achieve good positioning effect, ensure accuracy and Stability, the effect of reducing system cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0034] The present invention will be further described in detail below in conjunction with the embodiments and the accompanying drawings, but the embodiments of the present invention are not limited thereto.
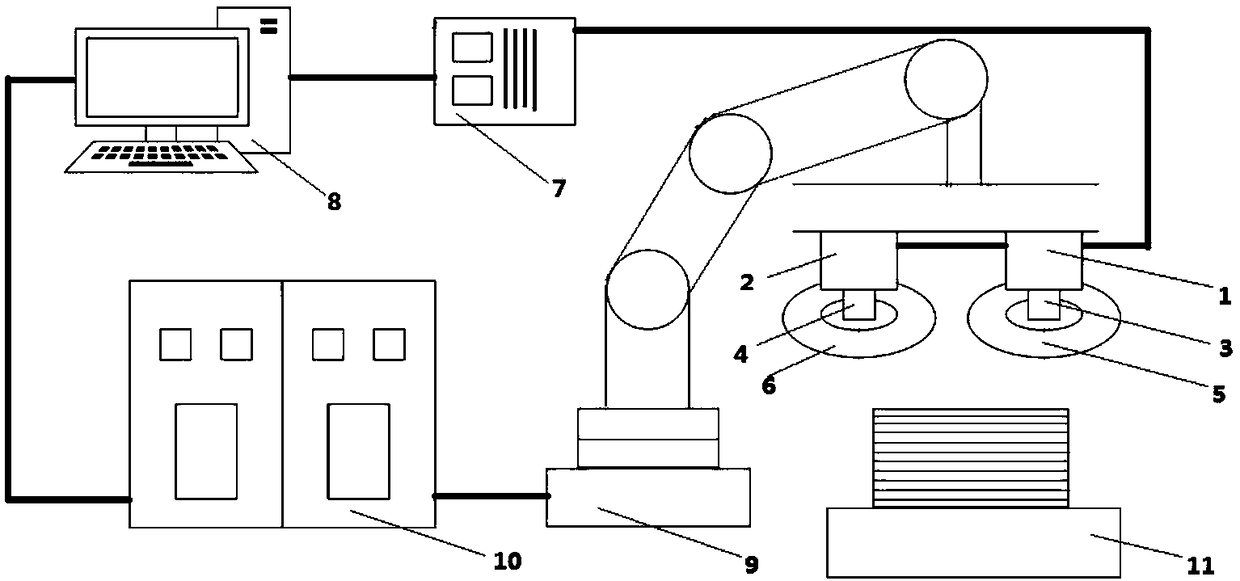
[0035] The vision-based elevator door panel positioning and grabbing device of the present invention is composed of a vision system device, an image acquisition card, an industrial computer and a robot, wherein:
[0036] see figure 1 , the vision system device includes cameras 1 and 2, lenses 3 and 4, light sources 5 and 6; wherein, the two cameras 1 and 2, lenses 3 and 4 are installed at one end of the suction cup gripper of the robot 9, and the light source 5 is installed under the camera 1 and the lens 3, and the light source 6 is installed under the camera 2 and the lens 4; the camera 1 and the lens 3, the camera 2 and the lens 4 are all used to take images within their working range, and capture the elevator doors that need to be processed. Material state image; Li...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More