

A Relative Navigation Close-Range Tracking Method and System for Space Non-cooperative Target Capture
A non-cooperative target and relative navigation technology, applied in the field of relative navigation short-distance tracking, can solve the problems of less research on continuous path planning, difficulty in obtaining interference graphs, and long algorithm convergence time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0104] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
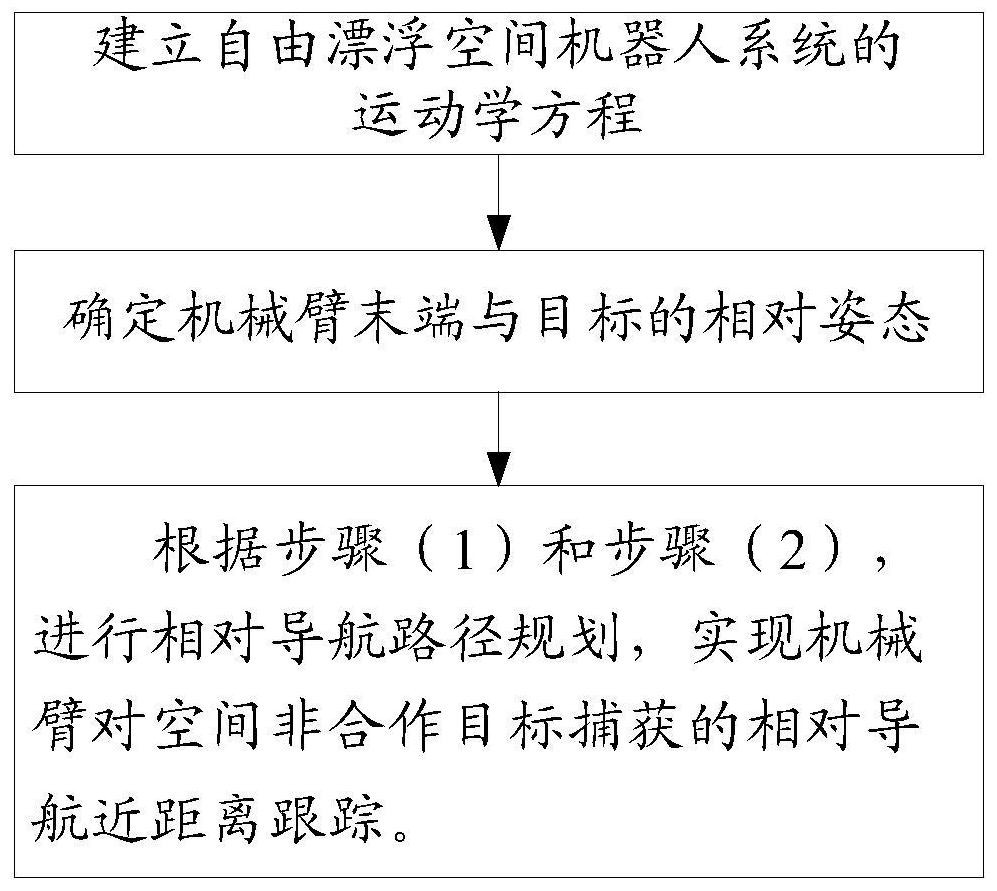
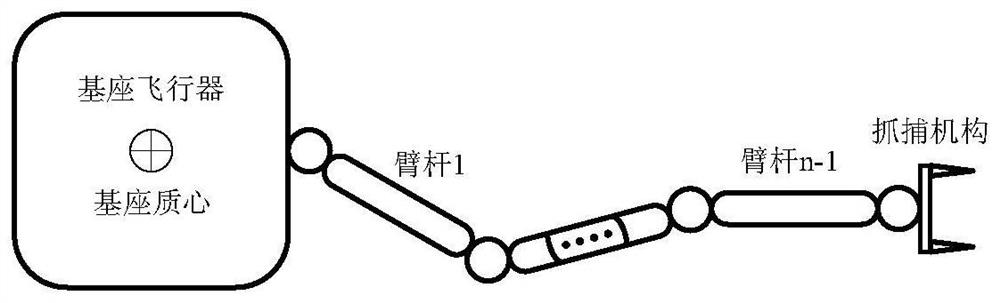
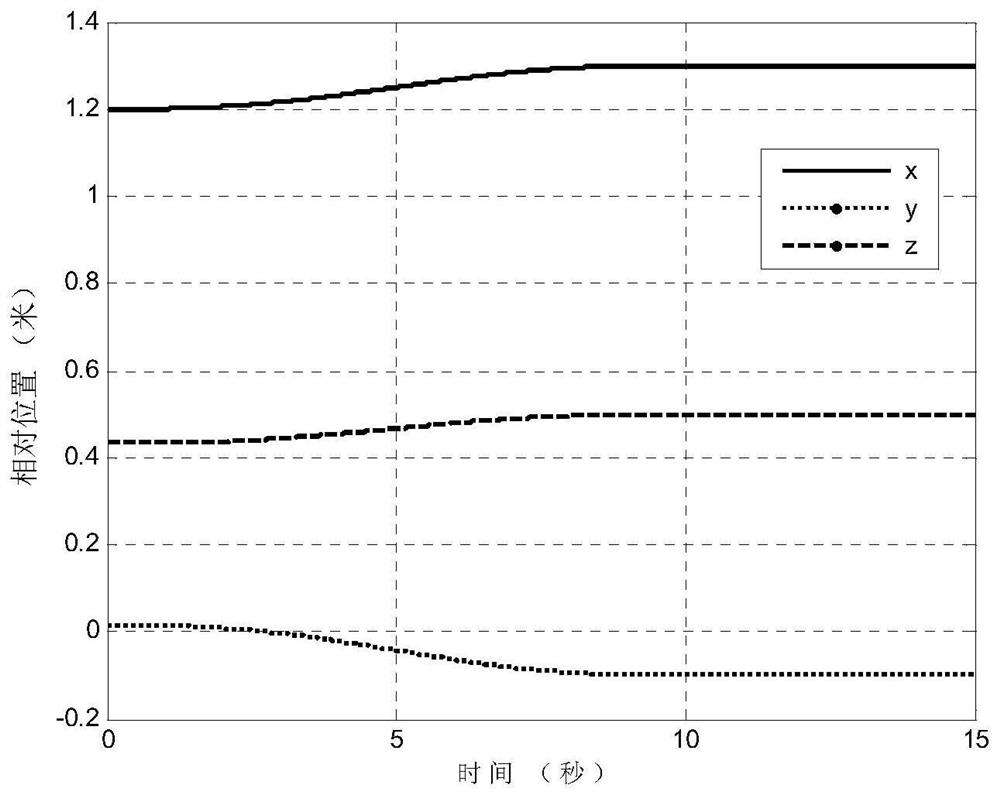
[0105] The present invention is a relative navigation short-distance tracking method and system for space non-cooperative target capture, using the kinematic equations of the free-floating space robot system to derive the path planning method for the mechanical arm to capture the moving target, using the end of the mechanical arm and The relative speed and relative attitude of the target are input, and the joint angle command to control the movement of the manipulator can be calculated, so that the manipulator can realize the capture operation of the moving target. Through this method, in the short-range relative navigation process of the space robot to the moving non-cooperative target, the path planning of the relative position and attitude between the end of the manipulator and the target can be realized autonomously, and the contin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More