Modular underwater robot and control method
An underwater robot, modular technology, applied in the direction of underwater operation equipment, instruments, signal transmission systems, etc., can solve the problems of high installation cost, limited use of underwater robots, complex structure of underwater robots, etc., to achieve faster speed , The effect of reducing procurement costs and reducing maintenance costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
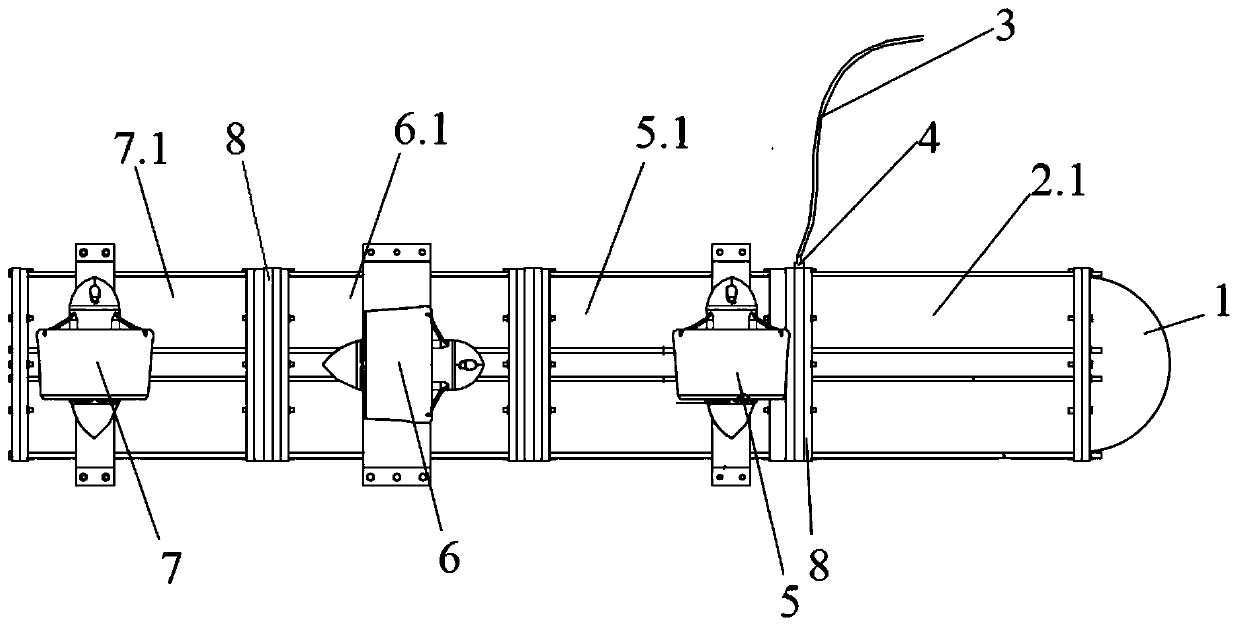
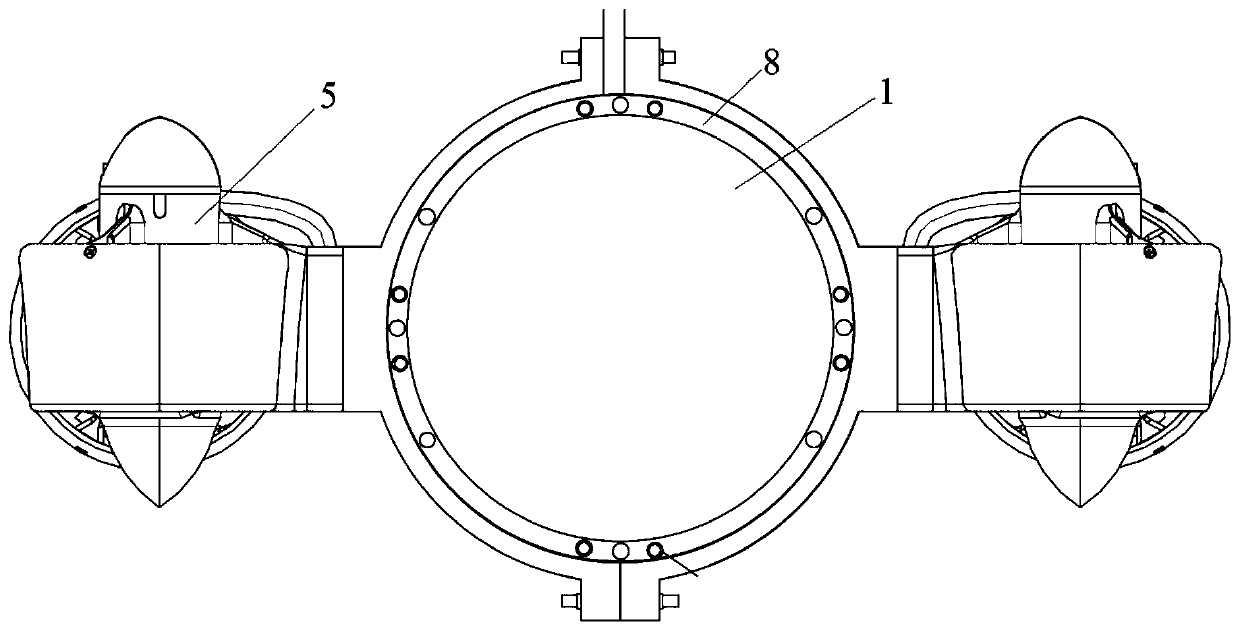
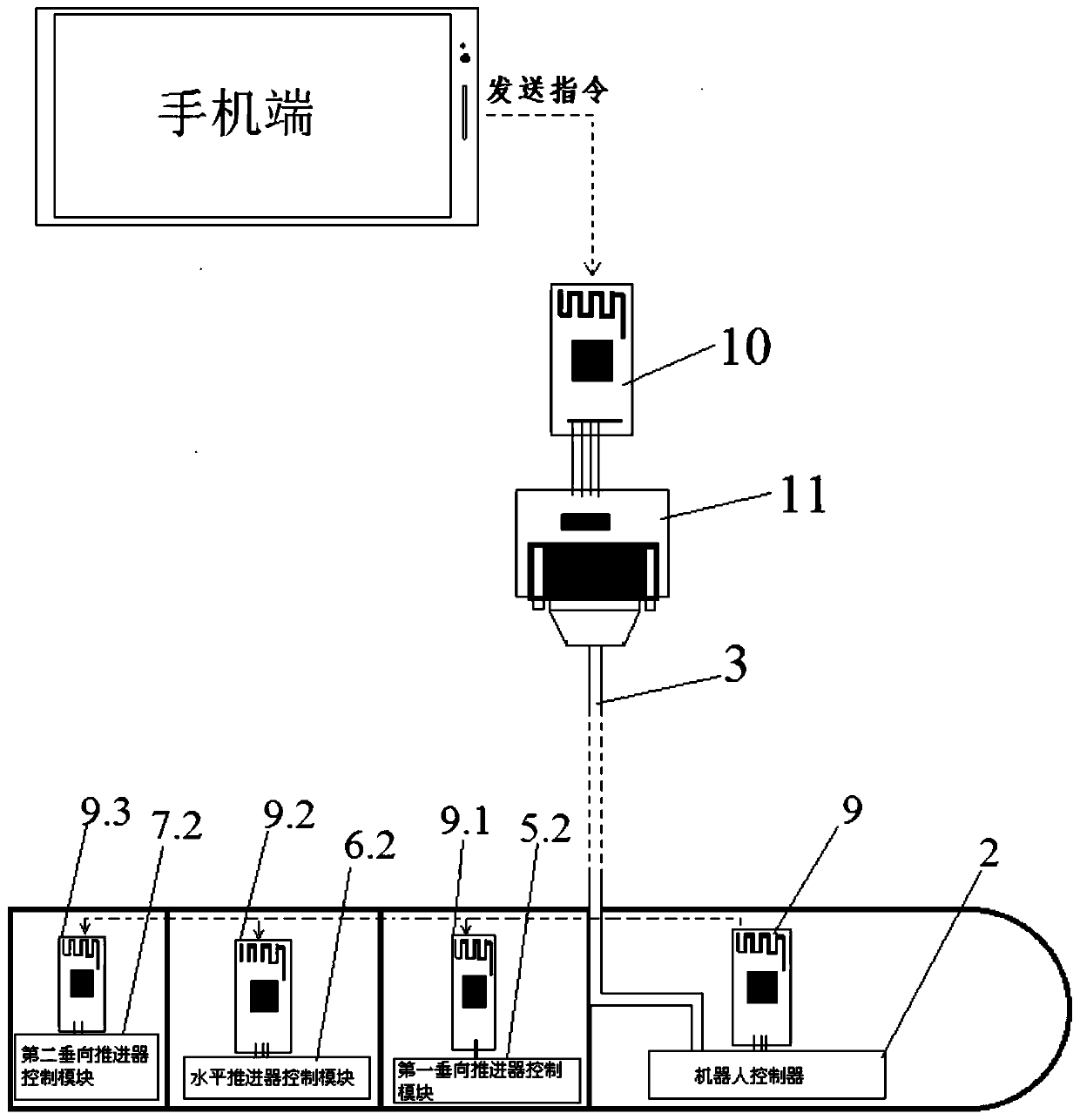
[0026] The present invention says a kind of modular underwater robot of design, as Figure 1~4 As shown, it includes the first pressure-resistant cabin 2.1, the second pressure-resistant cabin 5.1, the third pressure-resistant cabin 6.1, the fourth pressure-resistant cabin 7.1, the robot controller 2 arranged in the first pressure-resistant cabin 2.1, installed in The first vertical thruster group 5 on the side wall of the second pressure-resistant cabin 5.1, the first vertical thruster control module 5.2 arranged inside the second pressure-resistant cabin 5.1, and the side wall of the third pressure-resistant cabin 6.1 are installed The horizontal thruster group 6, the horizontal thruster control module 6.2 arranged inside the third pressure-resistant cabin 6.1, the second vertical thruster group 7 installed on the side wall of the fourth press...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com