

Unmanned aerial vehicle (100) return path planning method and device
A return-to-home path and UAV technology, applied in the field of UAVs, can solve the problems of return-to-home failure and stuck in
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
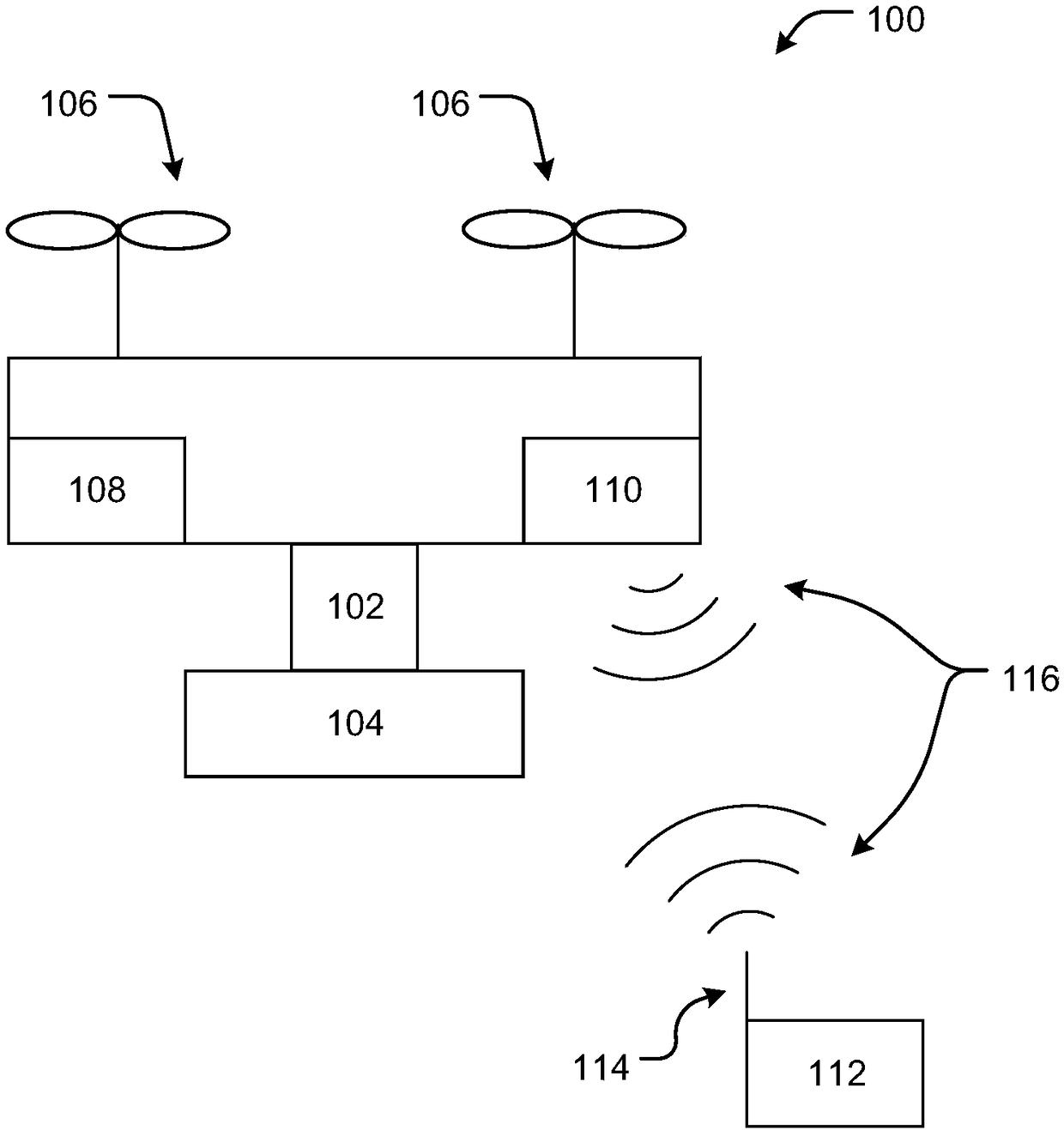
[0034] see figure 2 , a UAV return path planning method provided by an embodiment of the present invention. Wherein, the method can be implemented by a dedicated control device mounted on the UAV 100 , or by a flight controller of the UAV 100 .
[0035] The following will take the flight controller as the execution subject to further illustrate the specific process of the UAV return path planning method in the embodiment of the present invention.
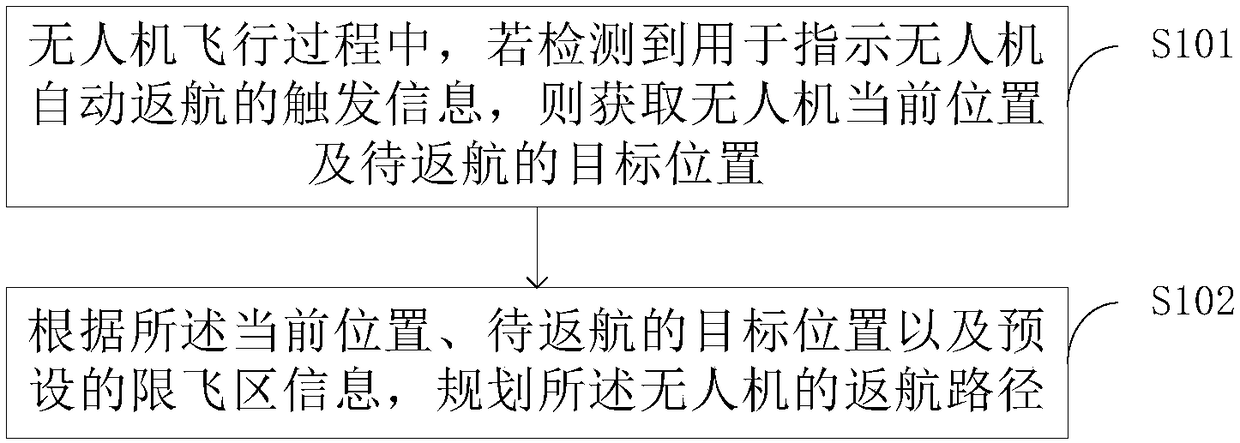
[0036] see figure 2 , the method may include the following steps:
[0037] Step S101: During the flight of the UAV 100, if the trigger information for instructing the UAV 100 to automatically return is detected, the current position of the UAV 100 and the target position to be returned are obtained;
[0038] In this embodiment, the trigger information indicates that the UAV 100 is out of control. The reasons for causing the unmanned aircraft to be out of control may be machine failures, environmental factors (such as interfere...
Embodiment 2
[0068] Corresponding to the UAV return path planning method described in Embodiment 1, the embodiment of the present invention provides a UAV return path planning device.
[0069] see Figure 5 , the UAV return path planning device may include a processor 11, wherein the processor 11 is configured to execute the steps of the UAV return path planning method described in the first embodiment above.
[0070] In this embodiment, the processor 11 may be selected as a controller in a dedicated control device, may also be selected as a flight controller of the UAV 100, or may be selected as a pan-tilt controller.
[0071] For the unexpanded parts, please refer to the same or similar parts of the UAV return path planning method in the first embodiment above, and will not be repeated here.
Embodiment 3
[0073] Corresponding to the UAV return path planning method described in Embodiment 1, the embodiment of the present invention provides a UAV return path planning device.
[0074] see Figure 6 , the UAV return path planning device may include:
[0075] The detection module 10, during the flight of the UAV 100, detects whether there is trigger information for instructing the UAV 100 to return automatically;
[0076] The acquisition module 20 is used to acquire the current position of the drone 100 and the target position to be returned after the detection module 10 detects the trigger information for instructing the automatic return of the drone 100;
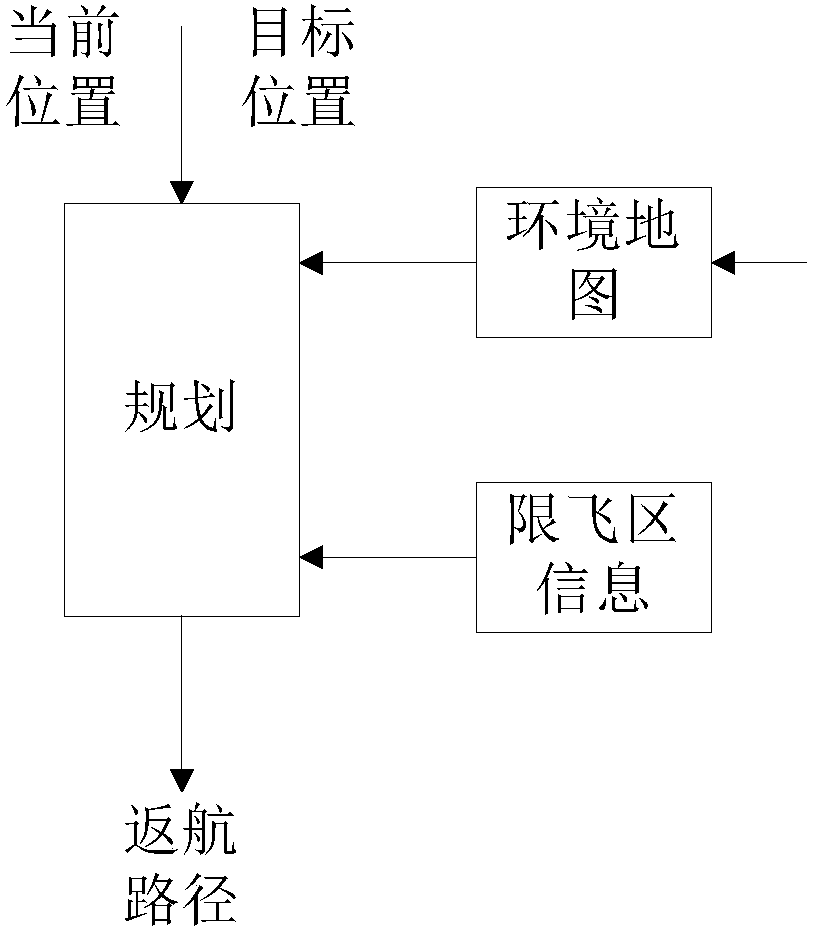
[0077] The planning module 30 is configured to plan the return route of the UAV 100 according to the current position, the target position to be returned and the preset restricted-fly zone information.
[0078] Further, the target position to be returned is a preset specific position; or, the target position to be returned is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More