

Unmanned aerial vehicle and control method of unmanned aerial vehicle
A control method and technology of drones, applied in the field of drones, can solve problems such as the exhaustion of the drone's battery, the deviation of the drone's course from the preset course, and the impact on the flight safety of the drone, so as to ensure safe return, The effect of improving reliability and safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Hereinafter, embodiments of the present disclosure will be described with reference to the drawings. It should be understood, however, that these descriptions are exemplary only, and are not intended to limit the scope of the present disclosure. Also, in the following description, descriptions of well-known structures and techniques are omitted to avoid unnecessarily obscuring the concepts of the present disclosure.
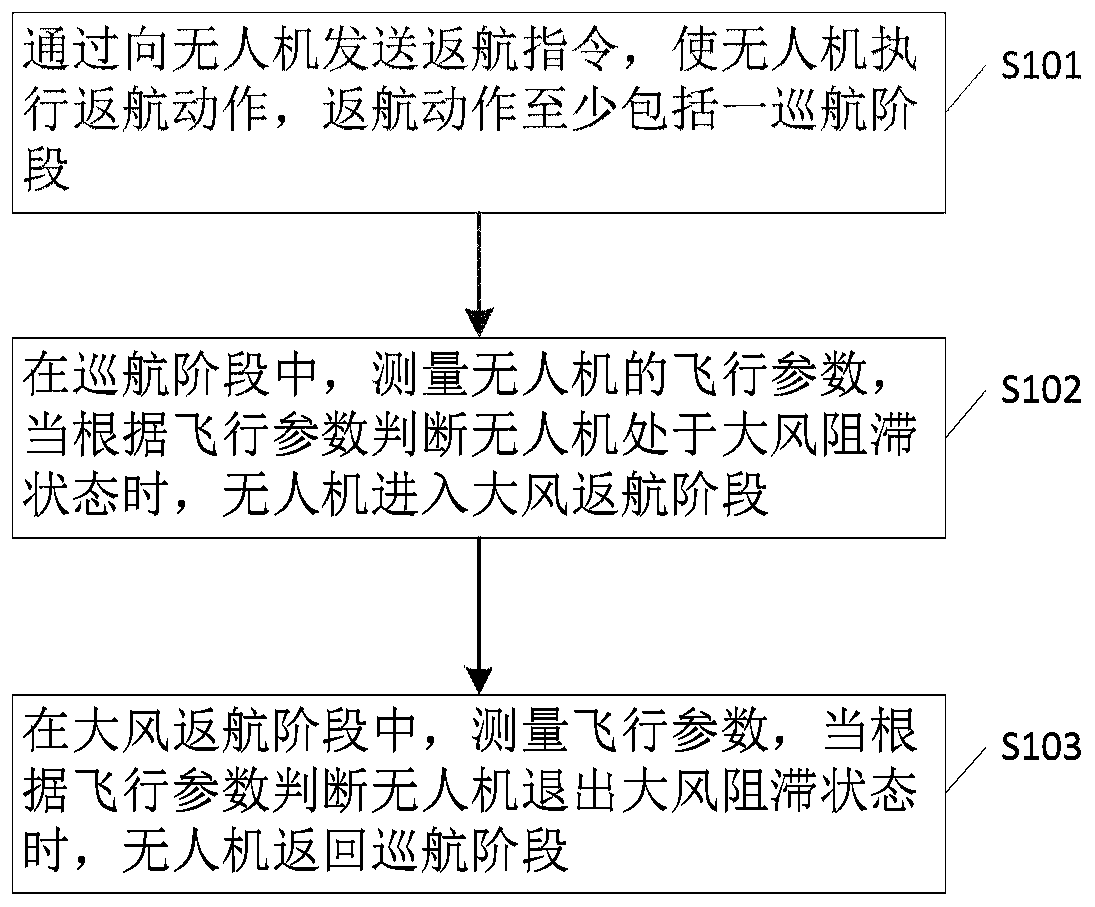
[0031] An embodiment of the present disclosure provides a method for controlling a drone, such as figure 1 As shown, the control method includes the following steps:
[0032] Step S101: By sending a return command to the UAV, the UAV performs a return action, and the return action includes at least one cruising phase.
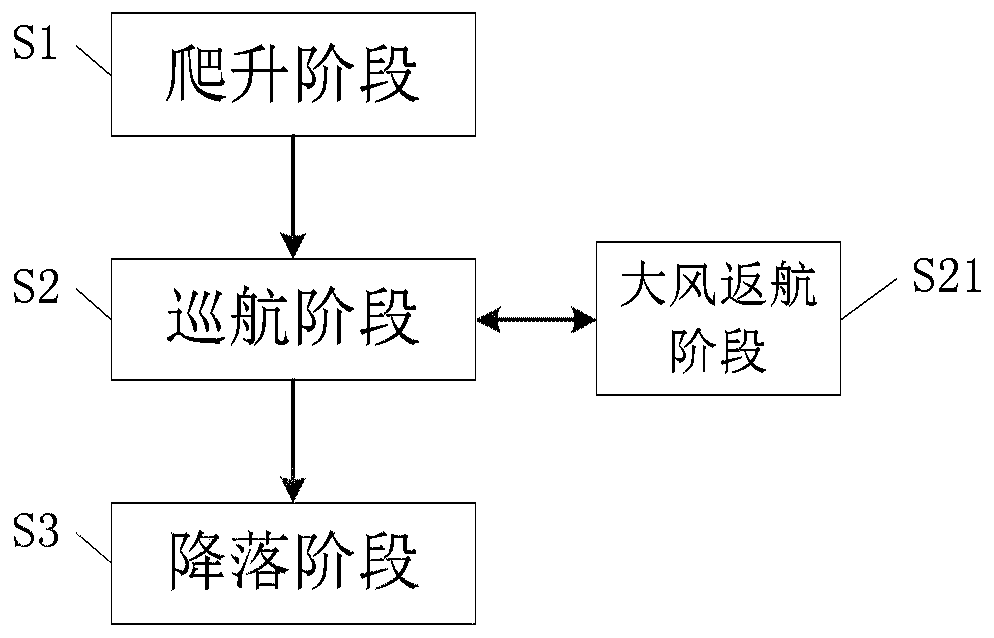
[0033] Such as figure 2 As shown, the return action includes: climbing phase S1, cruising phase S2, and landing phase S3, and the cruising phase S2 includes a strong wind returning phase S21.
[0034] The climb stage includes: return p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More