

A Manipulator Using Mechanical Structure to Realize Adaptive Object Shape
A technology of object shape and mechanical structure, applied in the field of manipulators, can solve the problems of difficult layout, easy aging and breaking of circuits, etc., and achieve the effect of ingenious and simple structure principle.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The technical solutions of the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
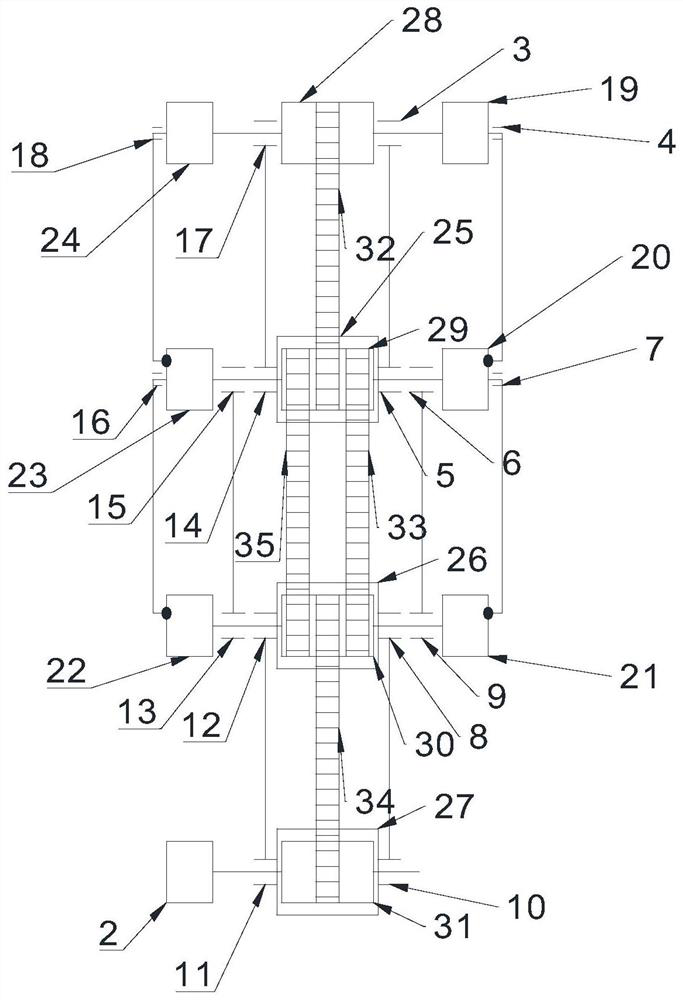
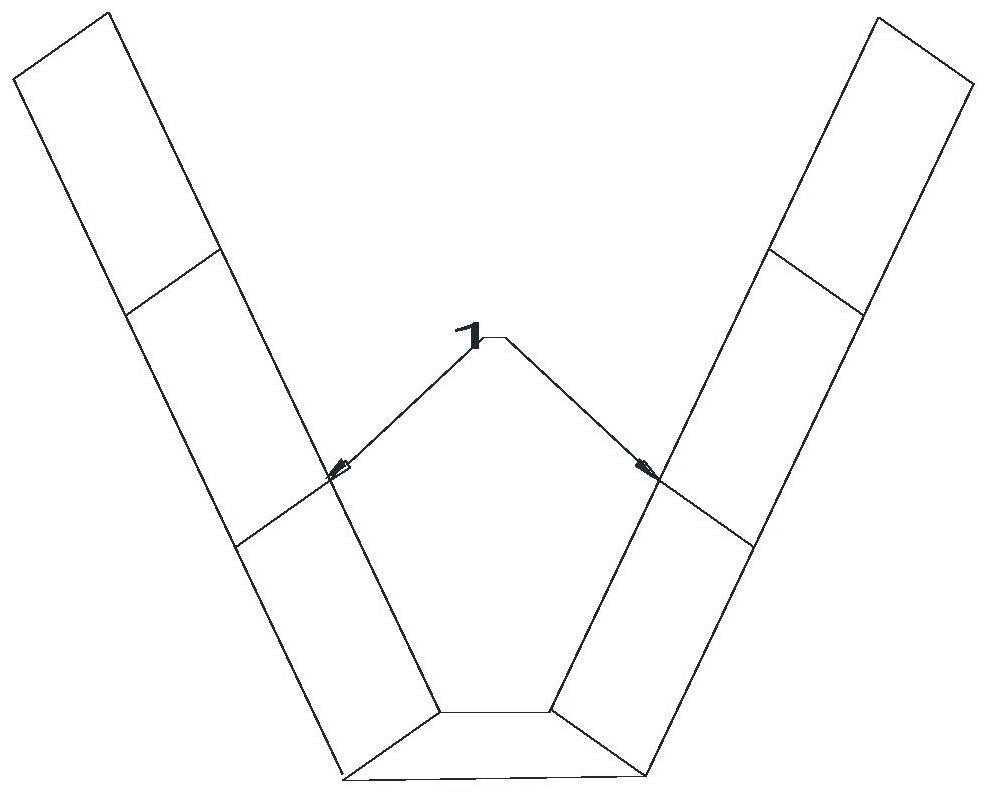
[0019] refer to figure 1 , a manipulator that uses a mechanical structure to realize an adaptive object shape, including two sets of manipulator mechanisms 1, the two sets of manipulator mechanisms 1 are symmetrically arranged, and the two sets of manipulator mechanisms 1 are completely consistent, including sixteen bearings, six resistance mechanisms, three Positioning parts, four synchronous wheels, four synchronous belts and motor 2, specifically the first bearing 3, the second bearing 4, the third bearing 5, the fourth bearing 6, the fifth bearing 7, the sixth bearing 8, the seventh bearing Bearing 9, Eighth Bearing 10, Ninth Bearing 11, Tenth Bearing 12, Eleventh Bearing 13, Twelfth Bearing 14, Thirteenth Bearing 15, Fourteenth Bearing 16, Fifteenth Bearing 17, Tenth Bearing Six bearings 18, first resi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More